Diferencia entre revisiones de «Manejar de forma remota al robot Butiá»
De Proyecto Butiá
(Página creada con ' == Sabías que... == Se puede manejar de forma remota al robot Butiá, es decir, si tienes dos computadoras, puedes conectar una al butiá, y manejar al robot desde la otra. S...') |
(→1) En la pc1:) |
||
| (No se muestran 28 ediciones intermedias del mismo usuario) | |||
| Línea 1: | Línea 1: | ||
| + | == '''¿Sabías que...''' == | ||
| − | + | Se puede manejar de forma remota al robot Butiá, es decir, si tienes dos computadoras, puedes conectar una al butiá, y manejar al robot desde la otra. Sólo necesitas: | |
| + | * dos computadoras que estén conectadas a la misma red. | ||
| + | * tener una de las últimas versiones de turtlebots (en ambas computadoras) | ||
| − | |||
| − | + | == '''Instrucciones''' == | |
| − | == Instrucciones == | + | |
Supongamos que tenemos la pc1 conectada al robot, y vamos a programarlo desde la pc2. Una vez conectadas ambas a la misma red: | Supongamos que tenemos la pc1 conectada al robot, y vamos a programarlo desde la pc2. Una vez conectadas ambas a la misma red: | ||
| − | === 1)En la pc1: === | + | ==='''1) En la pc1:'''=== |
| + | |||
| + | ::1.1) Abrir turtlebots | ||
| + | ::1.2) Ir a la paleta butia cast | ||
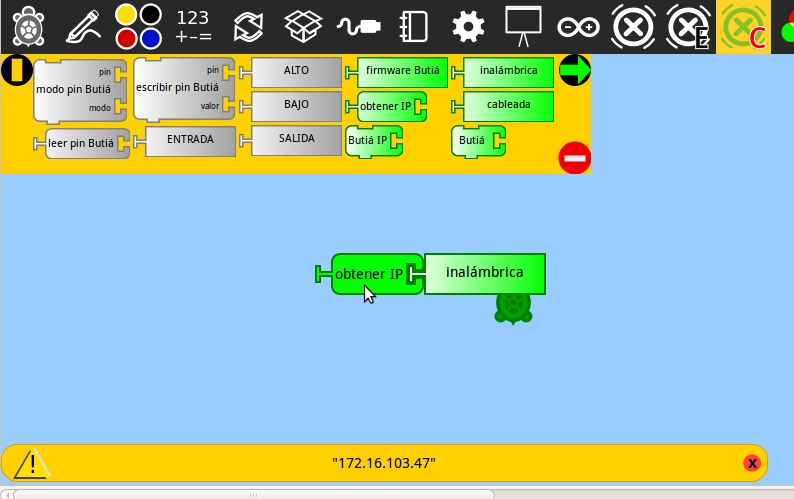
| + | ::1.3) Seleccionar el bloque ''obtener IP'' y conectarle el bloque ''inalámbrica'' o ''cableada'', dependiendo de cómo esté conectada la pc1 a la red. | ||
| + | ::1.4) Hacer click y se imprimirá en pantalla el IP.<br><br> | ||
| + | ::[[Archivo:ObtenerIP.jpg]]<br><br> | ||
| + | ::'''Observación''': Si pc1 es una xo, se debe elegir la opción ''cableada'' aunque esté conectada de forma inalámbrica. Esto es debido a un error de OLPC en el sistema operativo. <br> | ||
| + | |||
| + | ==='''2) En la pc2:'''=== | ||
| − | + | ::2.1) Abrir turtlebots | |
| − | + | ::2.2) Ir a la paleta butia cast. | |
| − | + | ::2.3) En el bloque ''Butia IP'' setear el IP que obtuvimos de la pc1. | |
| + | ::2.4) Hacer click sobre el bloque.<br><br> | ||
| + | ::[[Archivo:setearIP.jpg]]<br><br> | ||
| − | === | + | ==='''3) Listo!'''=== |
| + | ::A partir de este momento podrás controlar al butiá de forma remota! El programa que crees en la pc2, se ejecutará automáticamente en la pc1. | ||
Revisión actual del 13:42 30 jun 2015
¿Sabías que...
Se puede manejar de forma remota al robot Butiá, es decir, si tienes dos computadoras, puedes conectar una al butiá, y manejar al robot desde la otra. Sólo necesitas:
- dos computadoras que estén conectadas a la misma red.
- tener una de las últimas versiones de turtlebots (en ambas computadoras)
Instrucciones
Supongamos que tenemos la pc1 conectada al robot, y vamos a programarlo desde la pc2. Una vez conectadas ambas a la misma red:
1) En la pc1:
- 1.1) Abrir turtlebots
- 1.2) Ir a la paleta butia cast
- 1.3) Seleccionar el bloque obtener IP y conectarle el bloque inalámbrica o cableada, dependiendo de cómo esté conectada la pc1 a la red.
- 1.4) Hacer click y se imprimirá en pantalla el IP.
- Observación: Si pc1 es una xo, se debe elegir la opción cableada aunque esté conectada de forma inalámbrica. Esto es debido a un error de OLPC en el sistema operativo.

2) En la pc2:
- 2.1) Abrir turtlebots
- 2.2) Ir a la paleta butia cast.
- 2.3) En el bloque Butia IP setear el IP que obtuvimos de la pc1.
- 2.4) Hacer click sobre el bloque.


3) Listo!
- A partir de este momento podrás controlar al butiá de forma remota! El programa que crees en la pc2, se ejecutará automáticamente en la pc1.