
Sobre nuestro proyecto...

En esta parte del proyecto también colaboraron:
Pablo Gindel
Espasandín
Gustavo Armagno
Karina Curione
Este proyecto plantea como objetivo crear una plataforma simple y económica
que permita a alumnos de liceos pÚblicos, en coordinación con docentes e
inspectores de Enseñanza Secundaria, interiorizarse con la programación del
comportamiento de robots.
En setiembre de 2009 comenzamos a trabajar en esta versión del Butiá y en setiembre del 2010 hicimos la entrega de 27 robots.
A través de la robótica, se transmite a los profesores, estudiantes,
y a sus familias, conocimientos básicos sobre las nuevas tecnologías
y sus aplicaciones
Existen muchos mitos sobre las computadoras y los robots, desconocimientos básicos tanto sobre lo que pueden como lo que no pueden hacer, en ambos sentidos, y que genera por un lado miedos infundados y por otro expectativas desmedidas; que la incorporación de los robots y de la inteligencia computacional se está dando de manera progresiva en nuestra sociedad, y es importante entonces contribuir a mejorar el conocimiento de estas tecnologías.
Las actividades no serán parte de la educación formal o de una currícula, sino que son actividades extra-curriculares, organizadas partiendo del interés de los estudiantes y profesores, y que permitirán explorar los aspectos más variados y permear a través de la llegada a un público amplio y que tiene capacidad de transmisión (porque las familias de los liceales tendrán también a través de los mismos un contacto con la tecnología).
En este proyecto trabajarán por la Facultad de Ingeniería de la Universidad de la República:
-
El grupo MINA del Instituto de Computación.
-
El Departamento de Diseño Mecánico del Instituto de Mecánica y Producción Industrial.
-
La Unidad de Enseñanza.
La Inspección de Informática de Educación Secundaria y el proyecto InfoART, ANEP – CODICEN, actuarán como contraparte del proyecto.
La primer fase del proyecto fue financiada por

PROTOTIPO 1.0
En esta sección se publican los avances del robot butia. También se podrá obtener información sobre las especificaciones del robot, ver imágenes, pruebas etc..
A continuación les dejamos algunas imágenes del mecanismo de amortiguación.


22 de marzo de 2010
Performance: NiMH tienen una mayor performance sobre las NiCd.
Voltaje: Ambos tipos de pila tienen en teoría el mismo voltaje.
Capacidad : Esto habla sobre la cantidad de energía almacenada. Las baterías de níquel-hidruro metálico pueden almacenar más del doble de lo que pueden almacenar las de níquel cadmio.
Efecto "memoria": Las de NiMH no tienen "memory effect". Esto significa que pueden ser cargadas en cualquier momento sin que este hecho afecte la duración. Las bateías NiCd en cambio, deben ser cargas una vez que fueron totalmente descargadas para no disminuir su ciclo de vida.
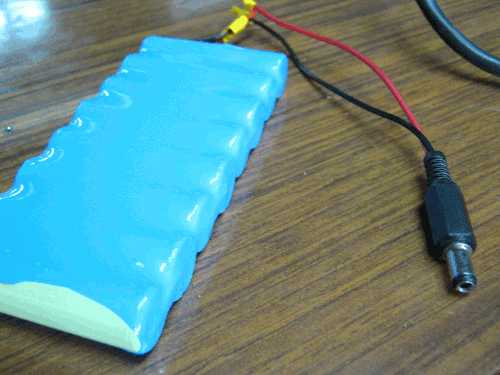
Luego de haber tomado la decisión, mandamos a hacer un pack de prueba de 8 pilas NiMH de 1,2 volts y 1700 mAH cada una. Este pack nos entrega un voltaje de 10,25 volts (teóricamente debería ser 9.6v).
Este pack de pilas se conecta directo a la placa Arduino la cual utiliza el pack para su alimentación y también redistribuye alimentación para los motores y sensores que haya en el sistema.
19 de marzo de 2010
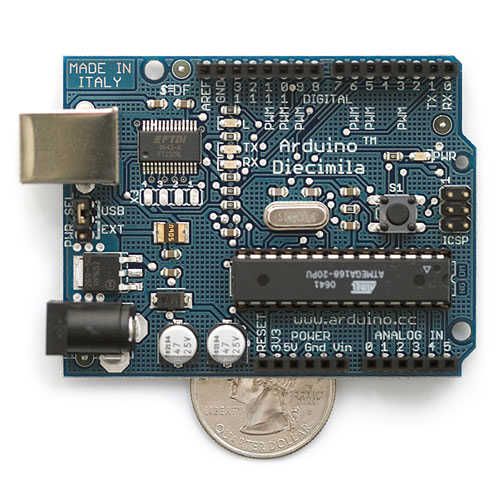
Arduino es una plataforma open-hardware basada en una sencilla
placa con entradas y salidas (E/S), analógicas y digitales, y
en un entorno de desarrollo que implementa el lenguaje
Processing/Wiring.
Su corazón es el chip Atmega8, un
chip sencillo y de bajo coste que permite el desarrollo de
múltiples diseños.
Al ser open-hardware tanto su diseño como su distribución es libre. Es decir, puede utilizarse libremente para desarrollar cualquier tipo de proyecto sin tener que adquirir ningún tipo de licencia.
Para qué puedo usar ARDUINO?
Arduino puede utilizarse en el desarrollo de objetos interactivos autónomos o puede conectarse a un PC a través del puerto serie utilizando lenguajes como Flash, Processing, MaxMSP etc ... Las posibilidades de realizar desarrollos basados en Arduino tienen como límite la imaginación.
Especificaciones técnicas| Microntrolador | ATmega168 |
| Voltaje de trabajo | 5V |
| Voltaje de entrada (recomendado) | 7-12V |
| Voltaje de entrada (limite) | 6-20V |
| Pines Digitales E/S | 14 (de los cuales 6 nos ofrecen salida de PWM) |
| Pines de entrada Analógicos | 6 |
| DC corriente por pin E/S | 40 mA |
| DC corriente por pin 3.3V | 50 mA |
| Memoria flash | 16 KB ( ATmega168 ) o 32 KB ( ATmega328 ) donde 2 KB son usados para bootloader |
| SRAM | 1 KB ( ATmega168 ) o 2 KB ( ATmega328 ) |
| EEPROM | 512 bytes ( ATmega168 ) o 1 KB ( ATmega328 ) |
| Velocidad del reloj | 16 MHz |
Más info técnica sobre la placa en http://www.arduino.cc/en/Main/ArduinoBoardDuemilanove
17 de febrero de 2010
Hoy estuvimos haciendo pruebas sobre los motores. Hicimos un programa que cambia la velocidad de giro de las ruedas y además cambia el sentido de giro en forma aleatoria. Este programa una vez hecho lo cargamos en la placa arduino la cual esta conectada a los motores y es la encargada de comandarlos.
En este segundo video mostramos como el robot se puede mover soportando el peso de una computadora XO. La prueba quería testear la capacidad de los motores para mover el robot con la XO acoplada. La conclusión que se puede observar es que los motores tienen fuerza suficiente para mover a la computadora sin problemas. Cuanto tengamos la rueda que falta agregarle al robot vamos a hacerle pruebas en un plano inclinado para ver como se comportan los motores.
2 de febrero de 2010
Estas son las imágenes del primer prototipo, aunque está incompleto ya que le falta la rueda delantera (que va a ir amortiguada), le falta el pack de pilas recargables y además la placa microcontroladora arduino. El peso aproximado del robot: 2,600 kg. (incluyendo la XO).

Aquí tenemos una primera imagen frontal del robot con una XO acoplada a él. La idea es que el robot pueda funcionar de dos maneras, una sería conectado a la XO y la otra de forma autónoma sin necesidad de estar conectado a ninguna computadora auxiliar.


En estas vistas laterales se puede apreciar mejor uno de los motores dinamixel AX12 con su respectiva rueda.