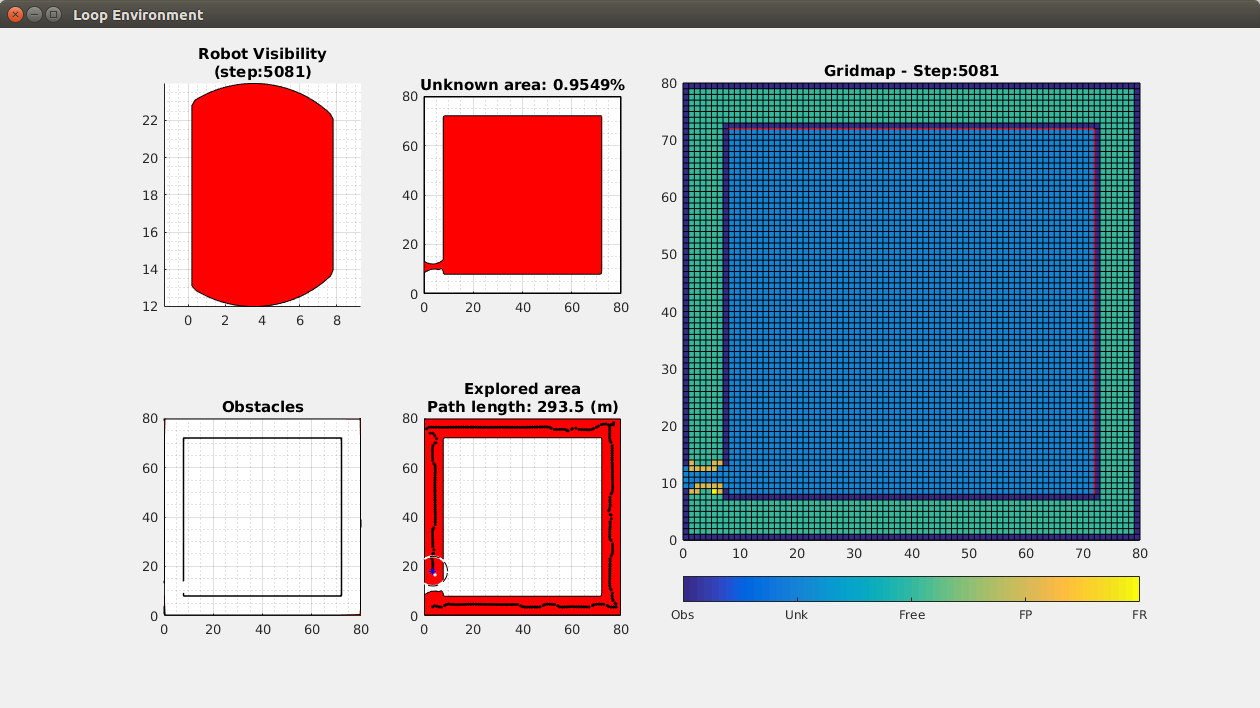
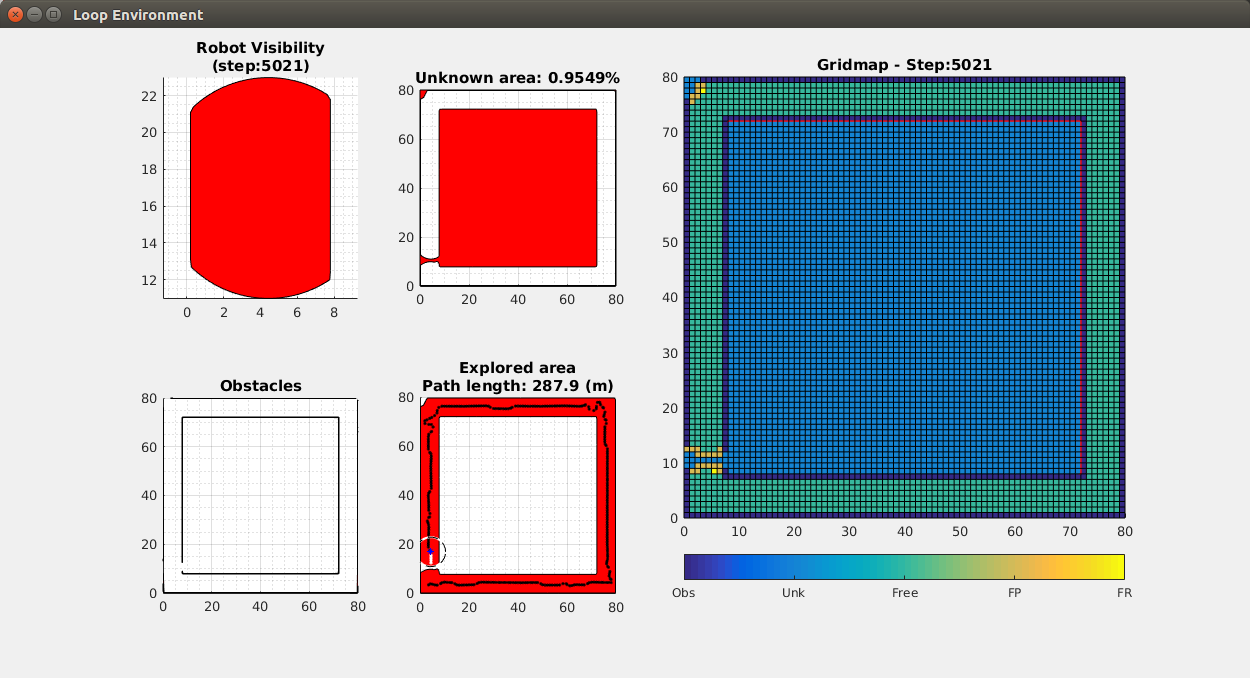
Loop (1 robot)
|
Yamauchi |
minPos |
Multi-objective |
| |
![Loop_1R_yamauchi_cc0]()
|
|
|
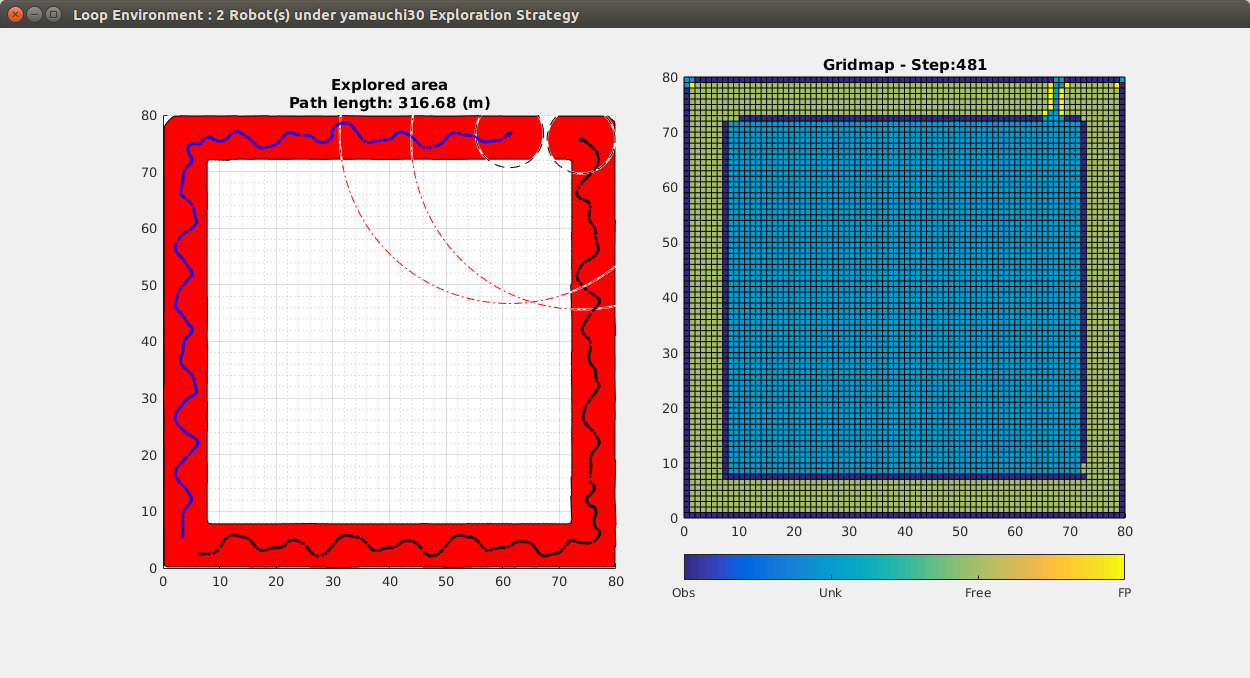
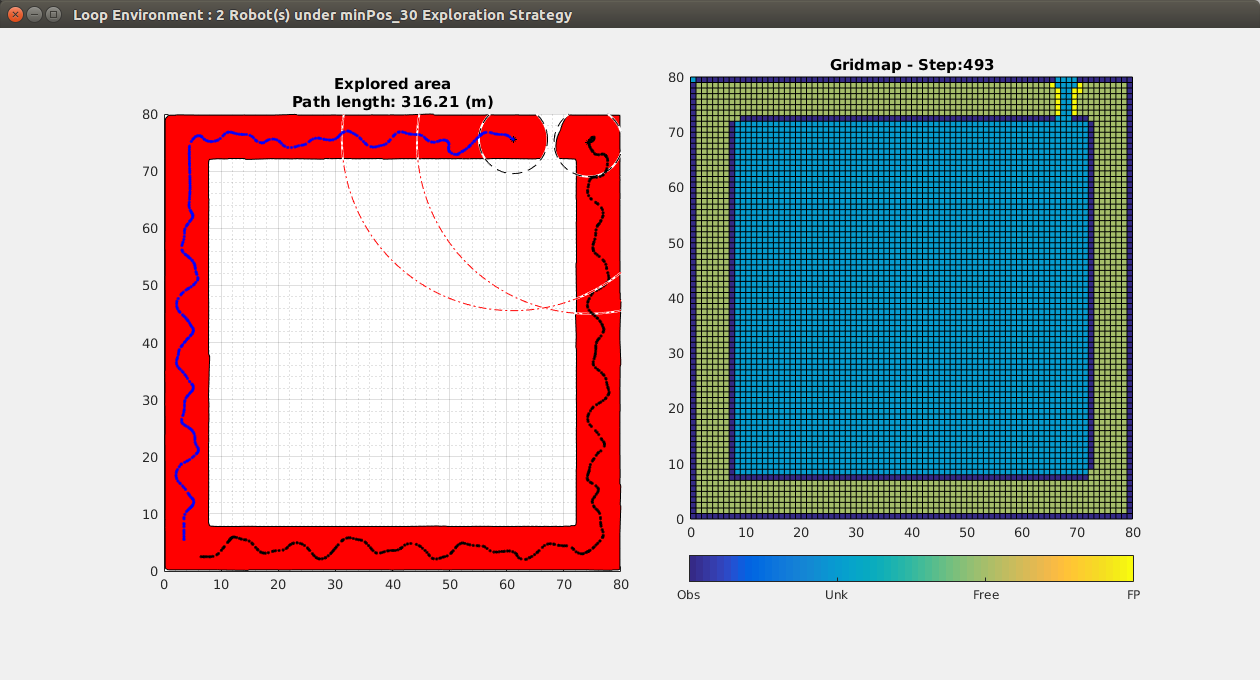
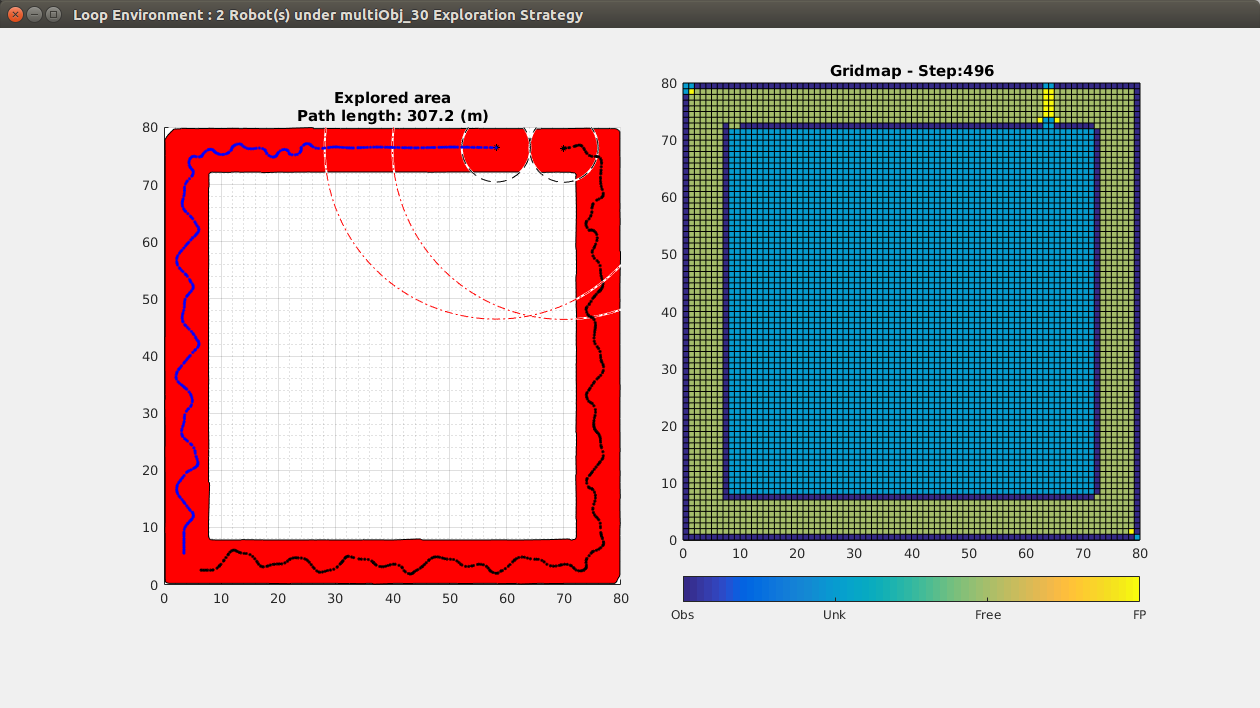
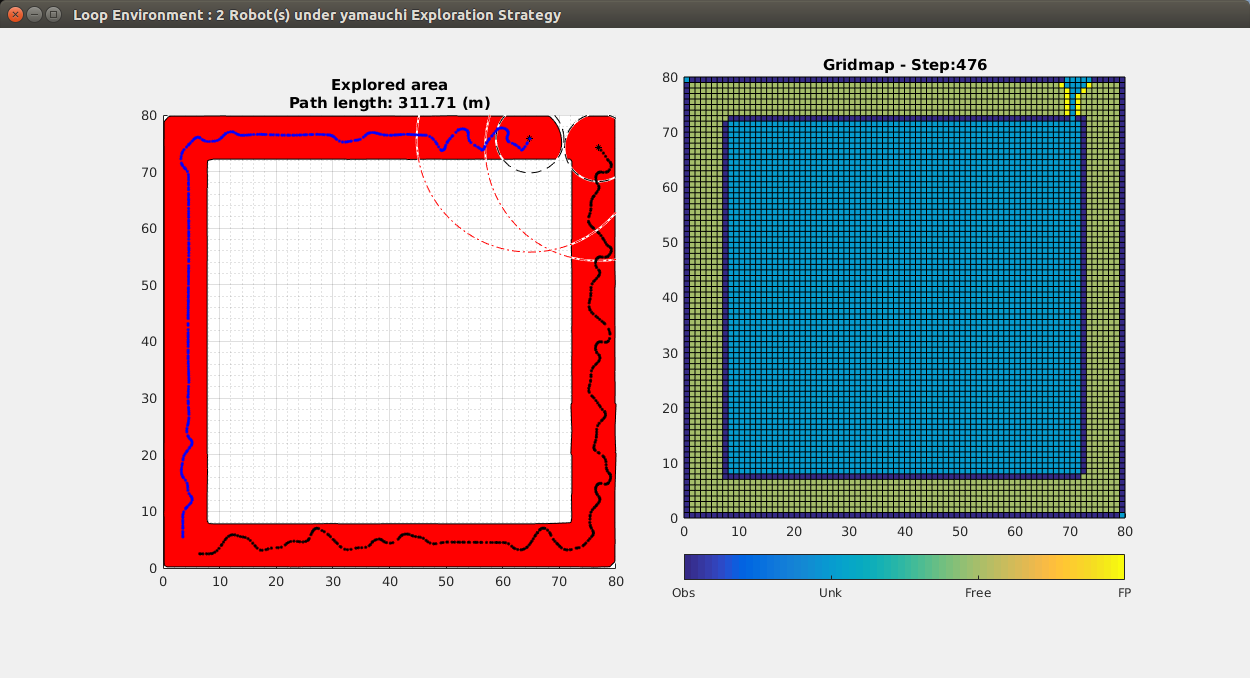
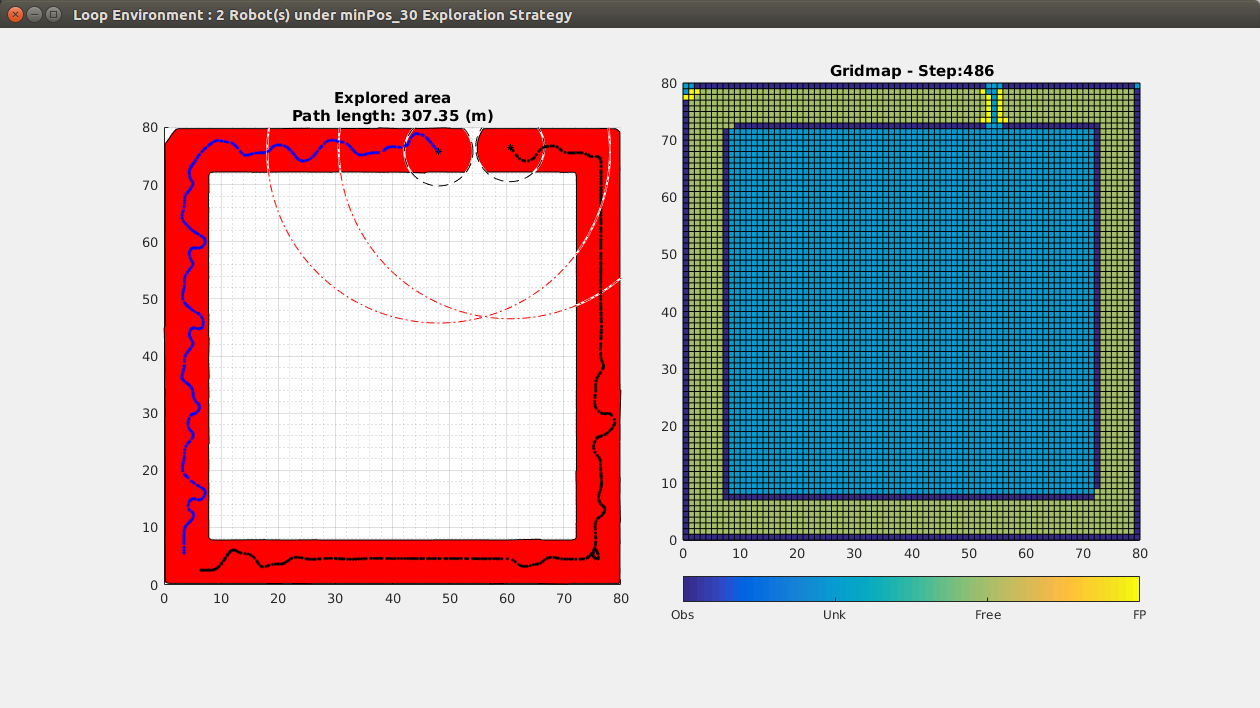
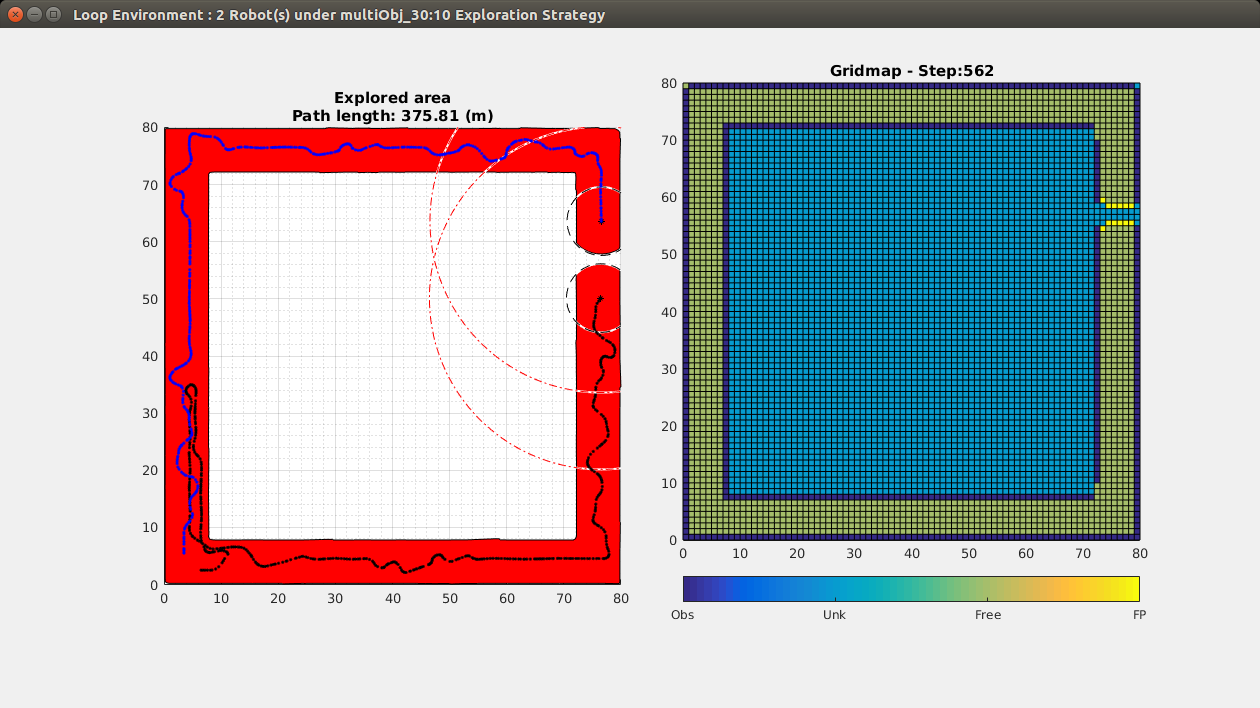
Loop (2 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
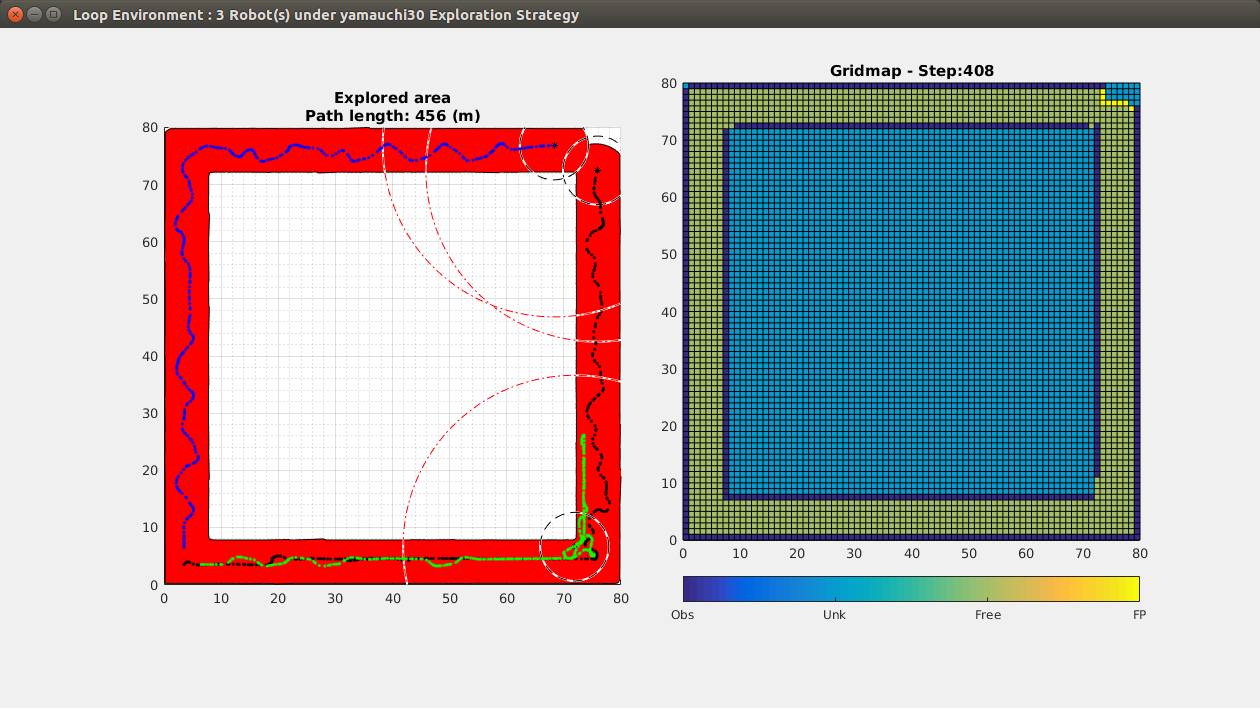
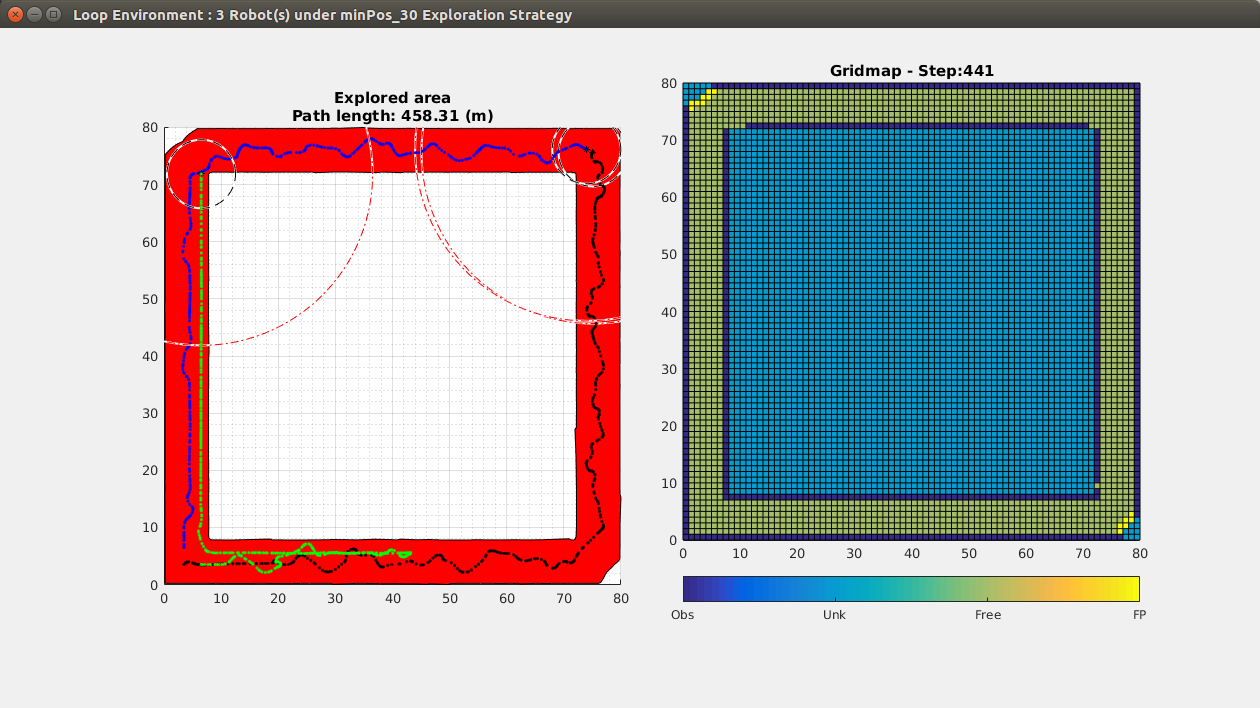
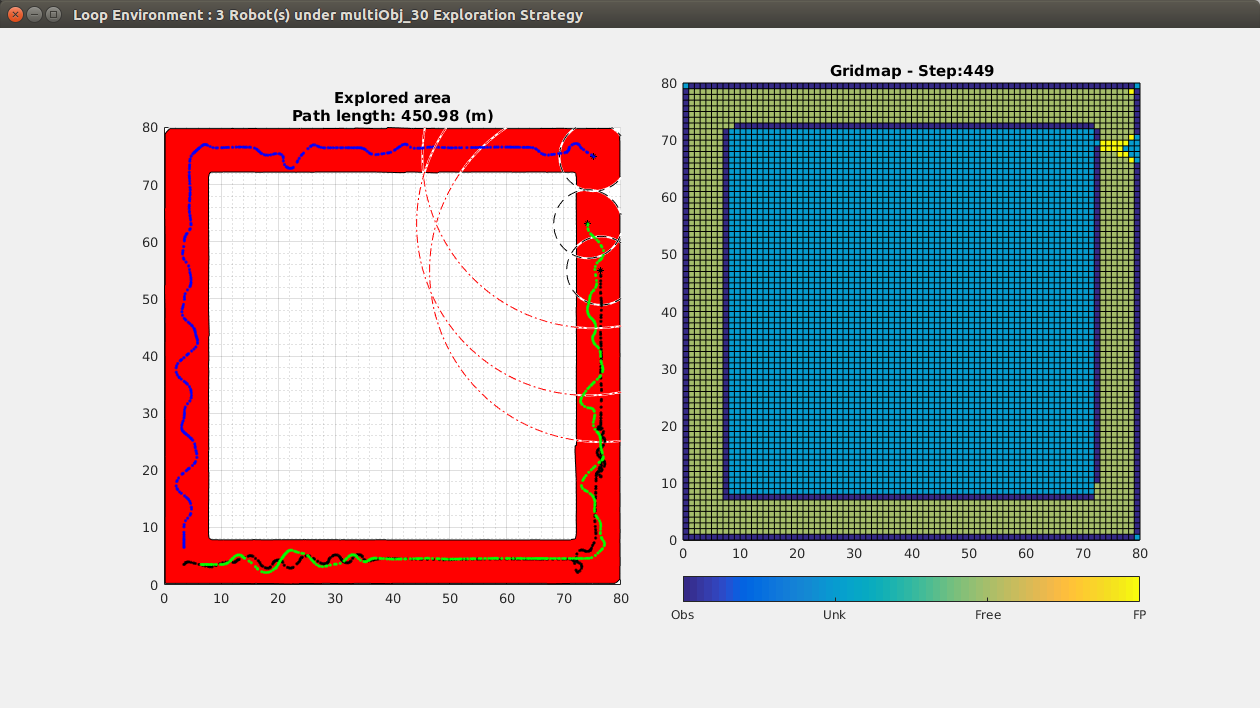
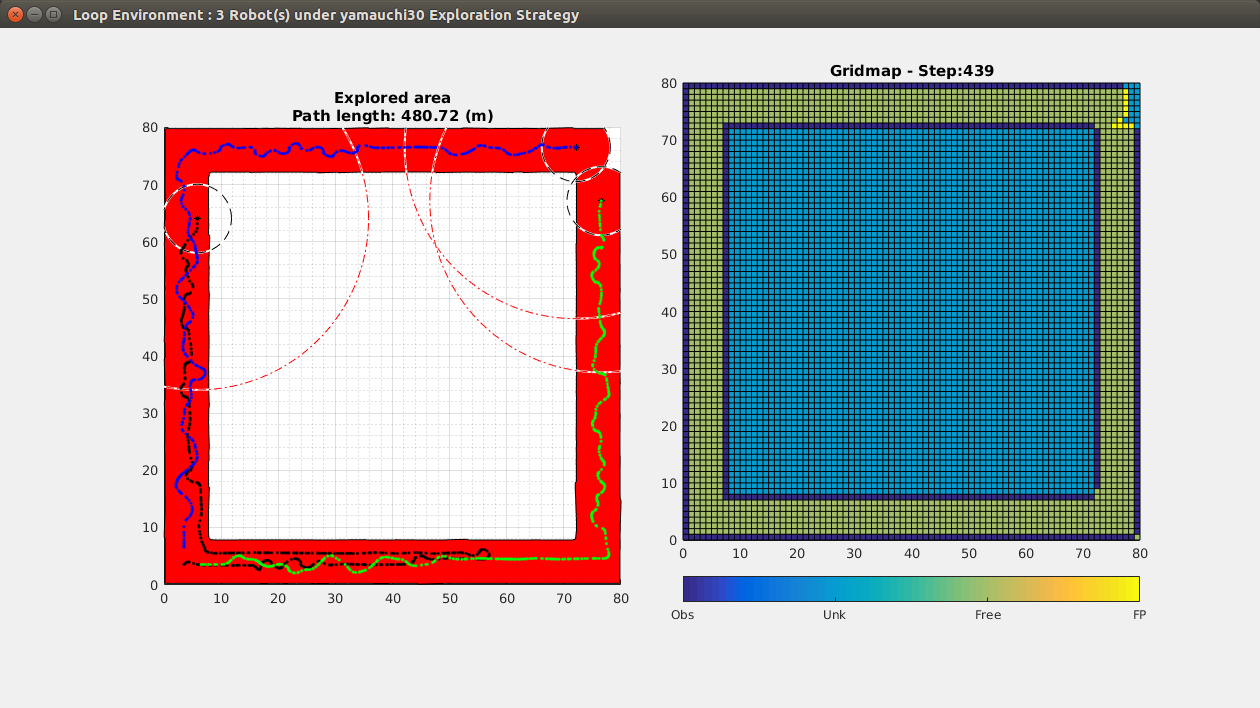
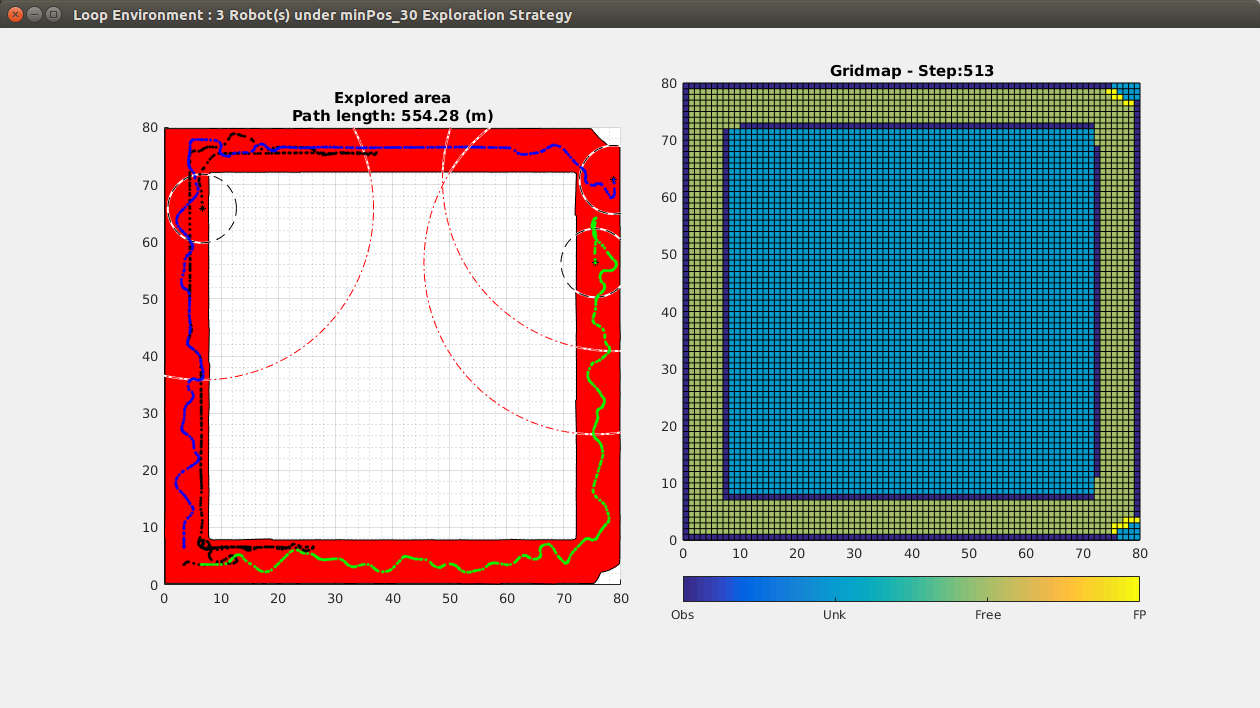
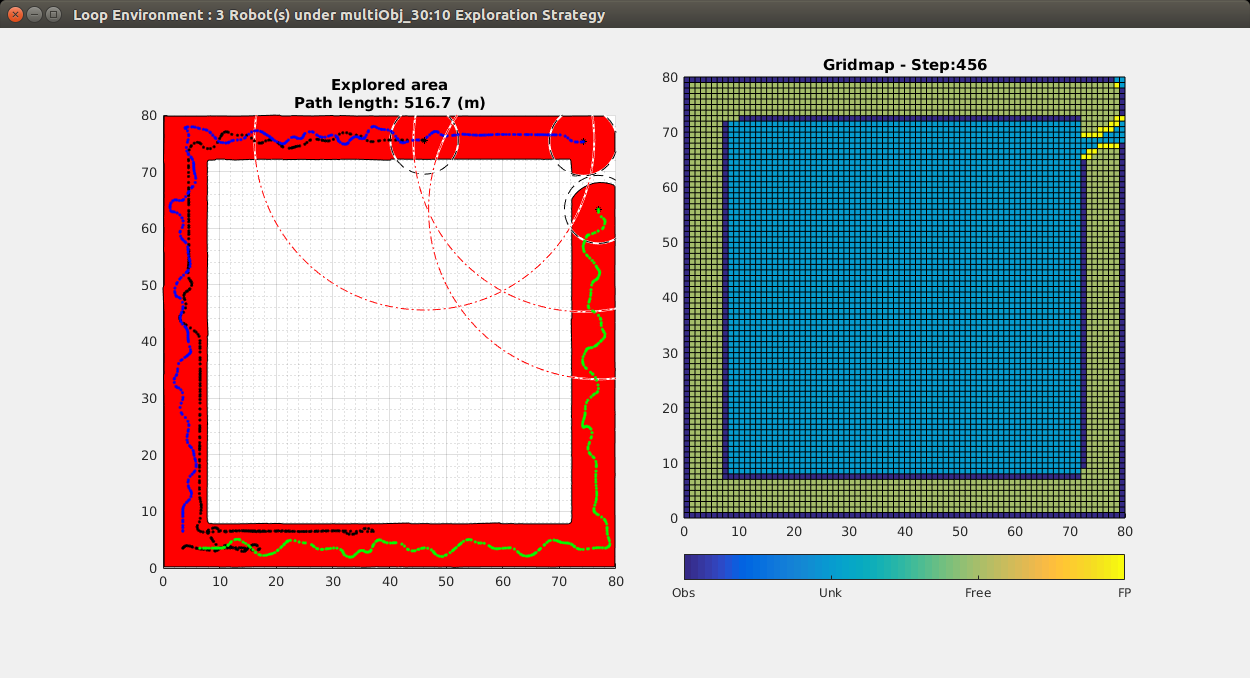
Loop (3 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
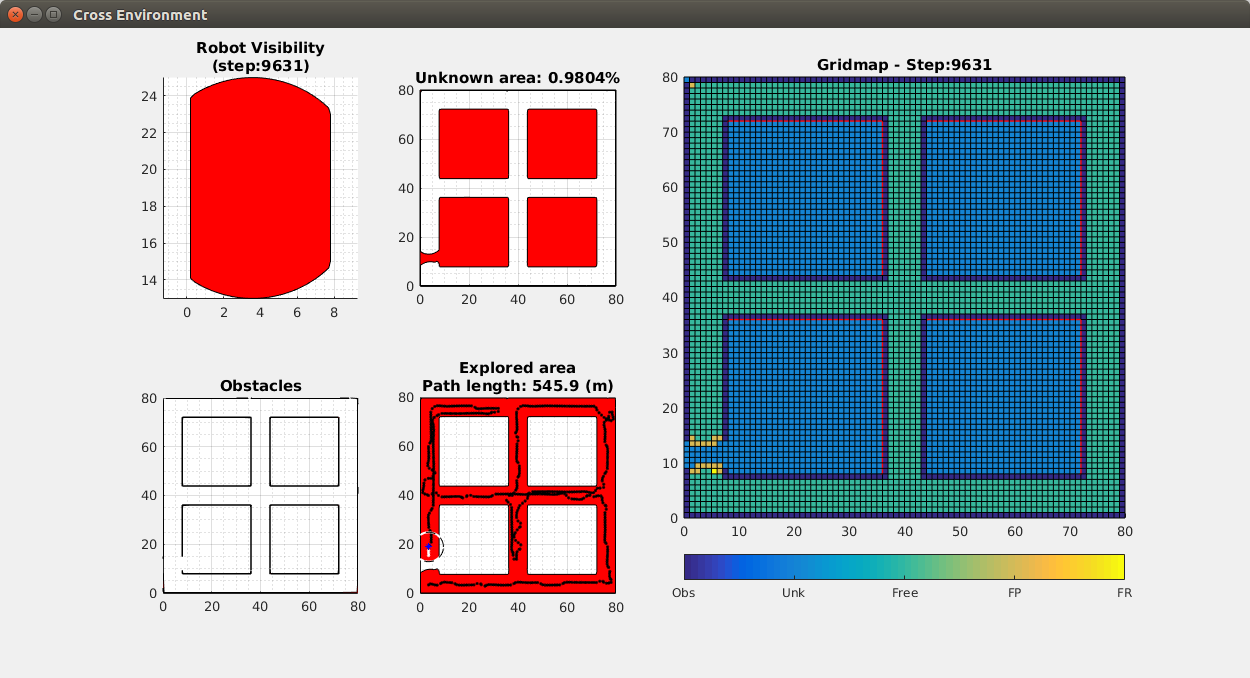
Cross (1 robot)
|
Yamauchi |
minPos |
Multi-objective |
| |
|
|
|
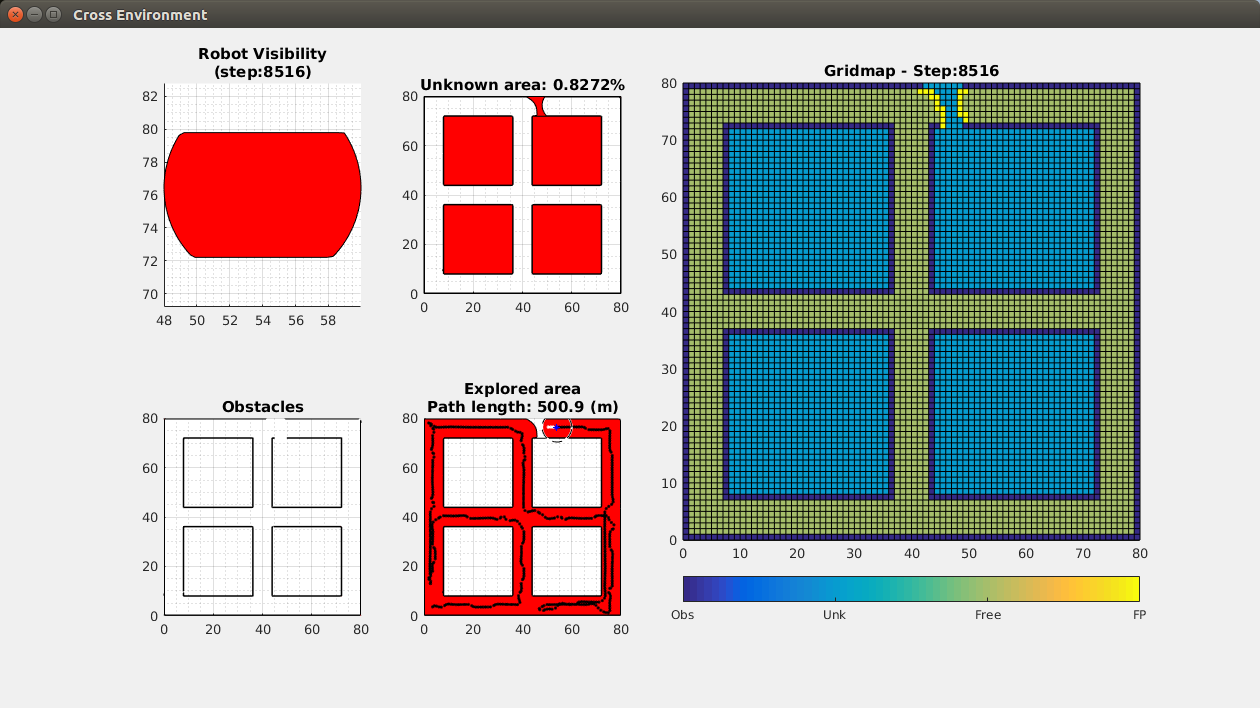
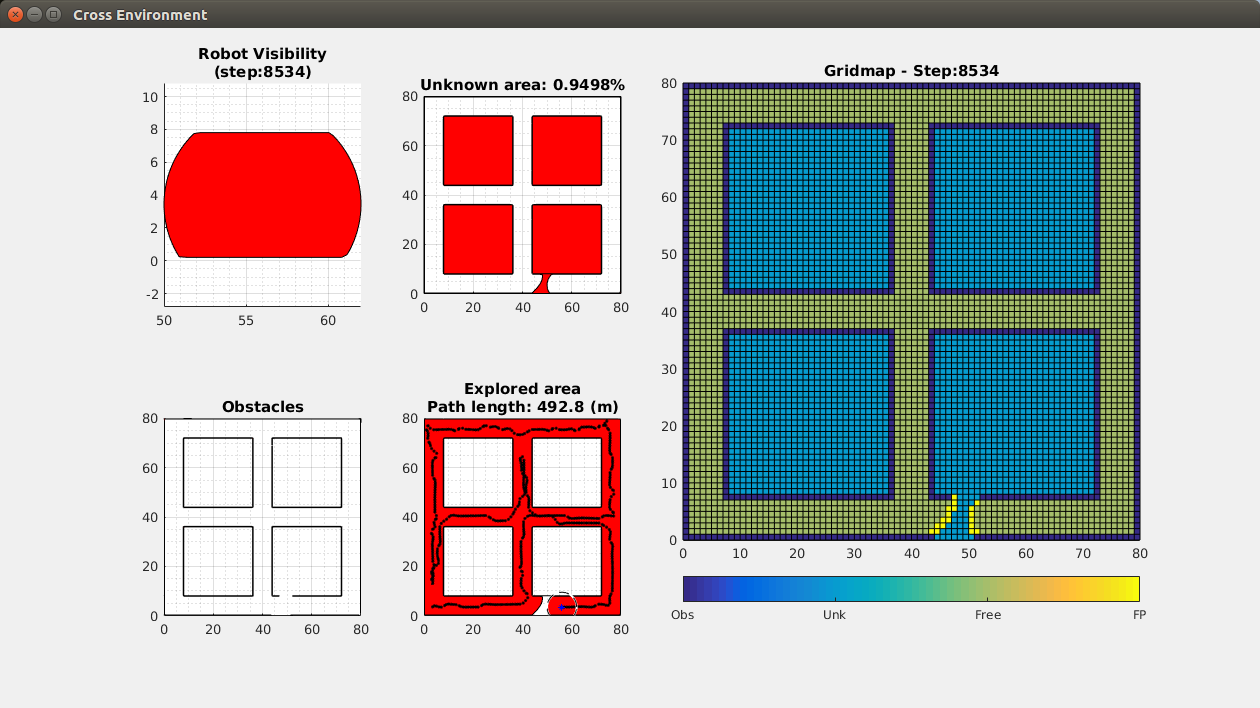
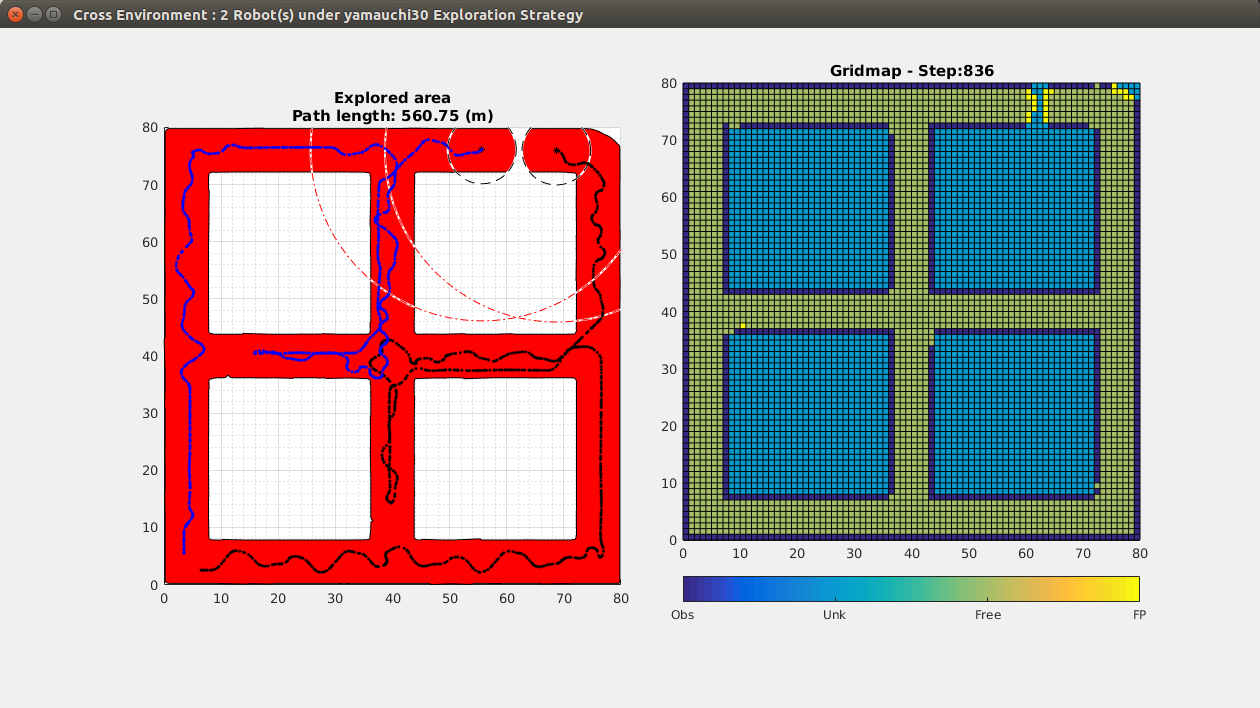
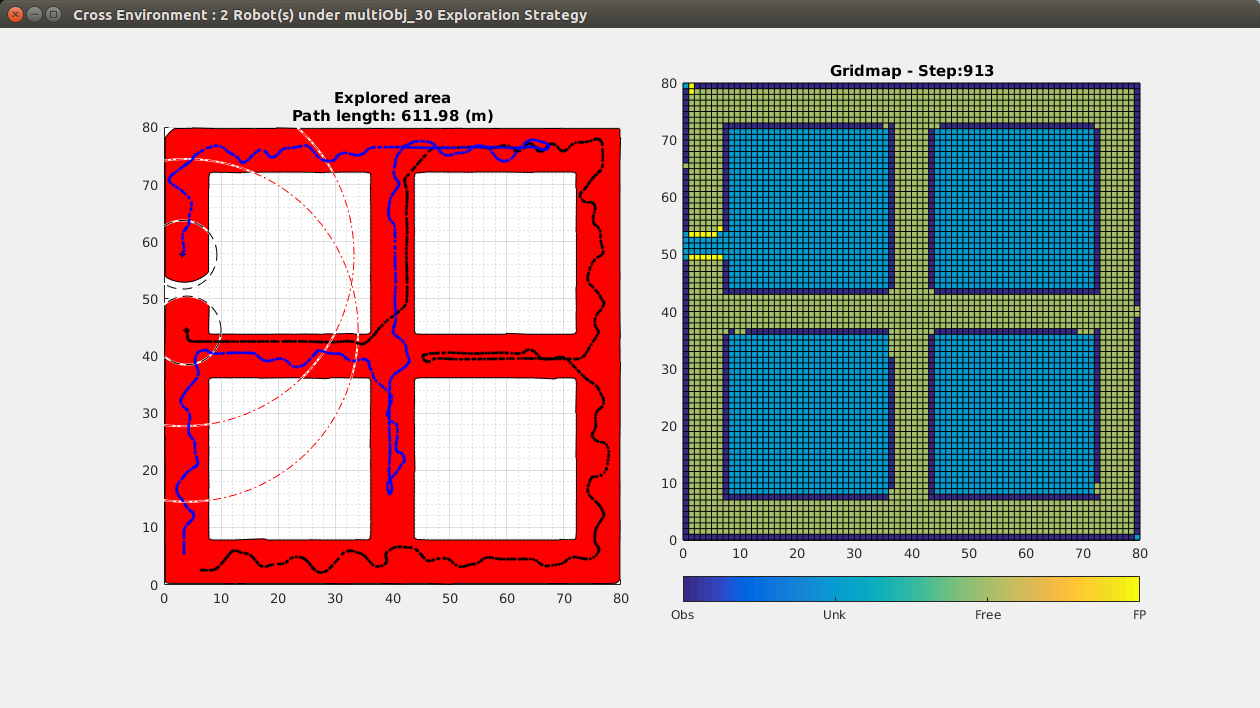
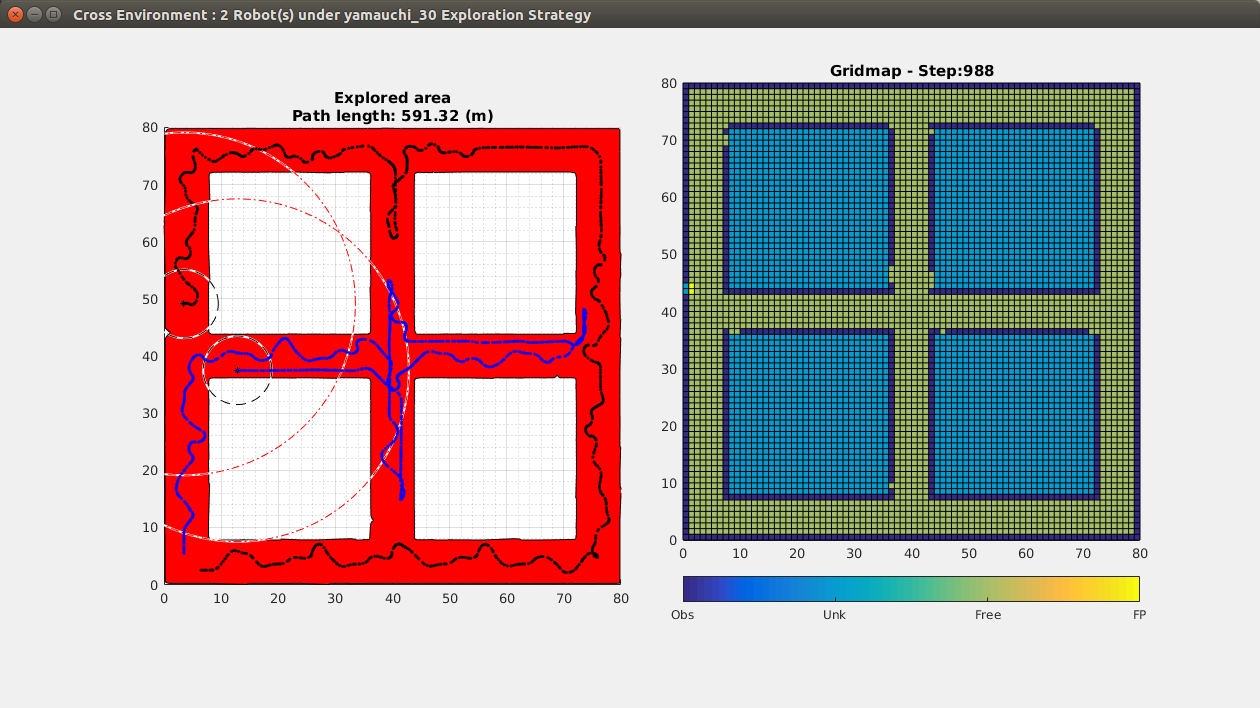
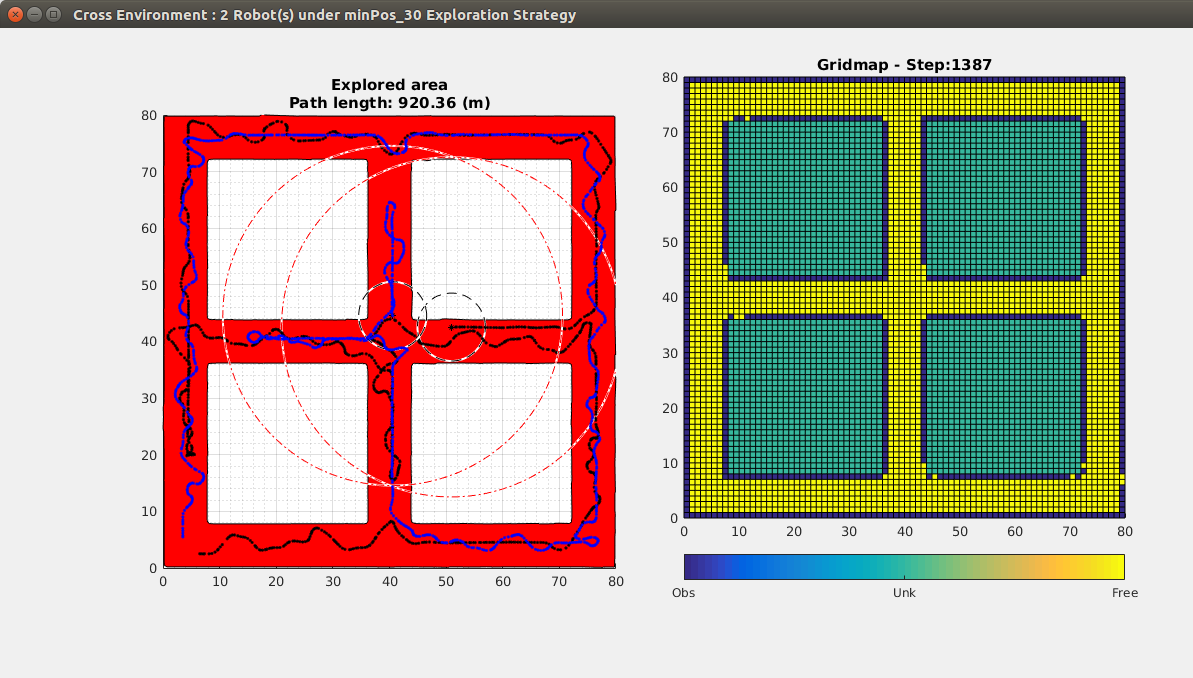
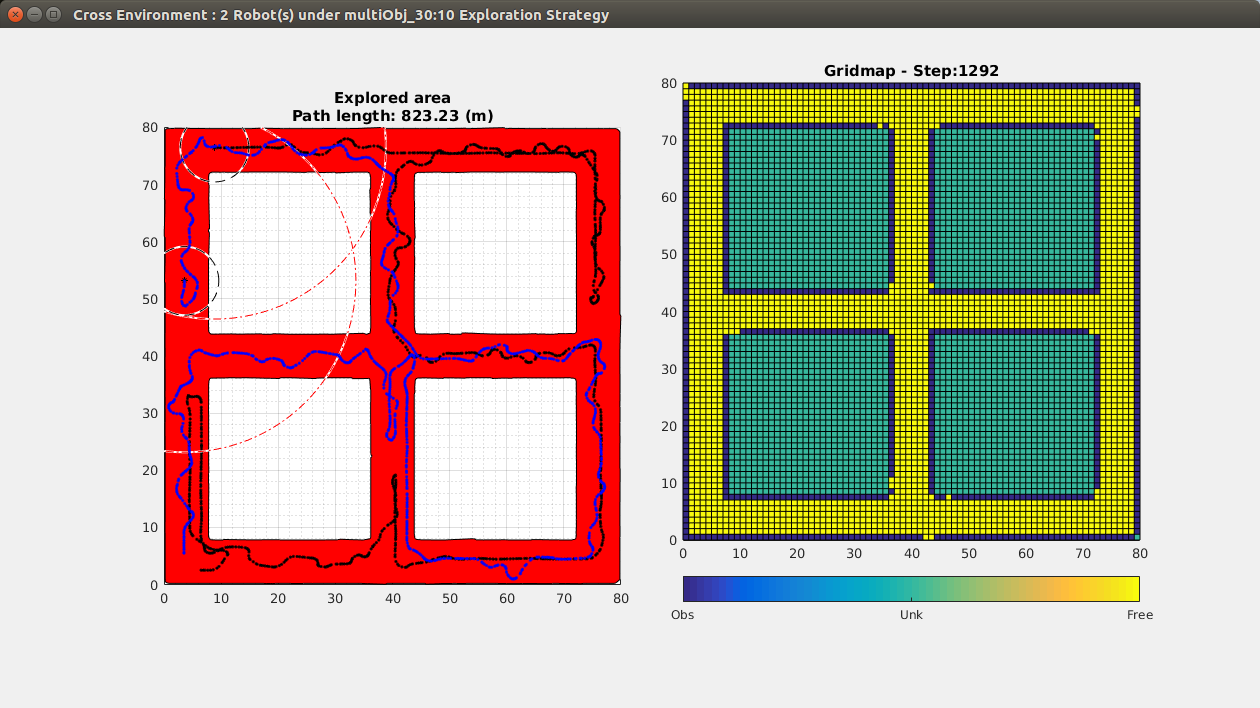
Cross (2 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
![Cross_2R_minpos_cc0]() |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
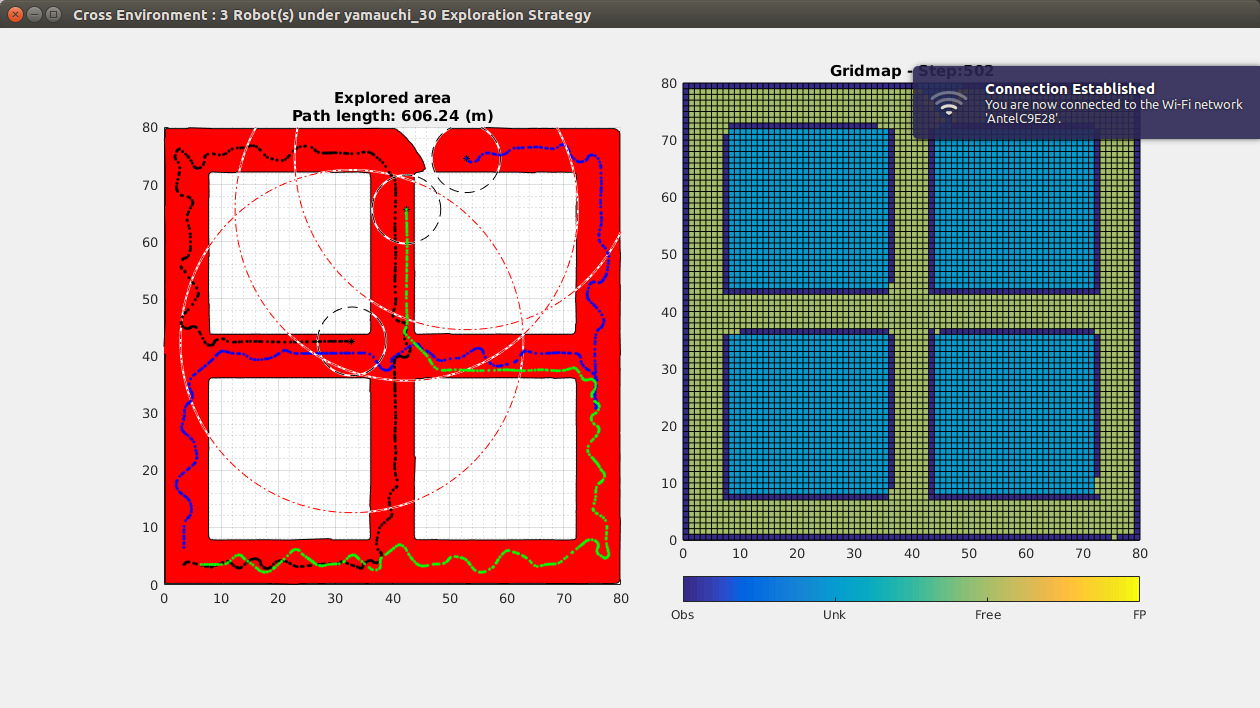
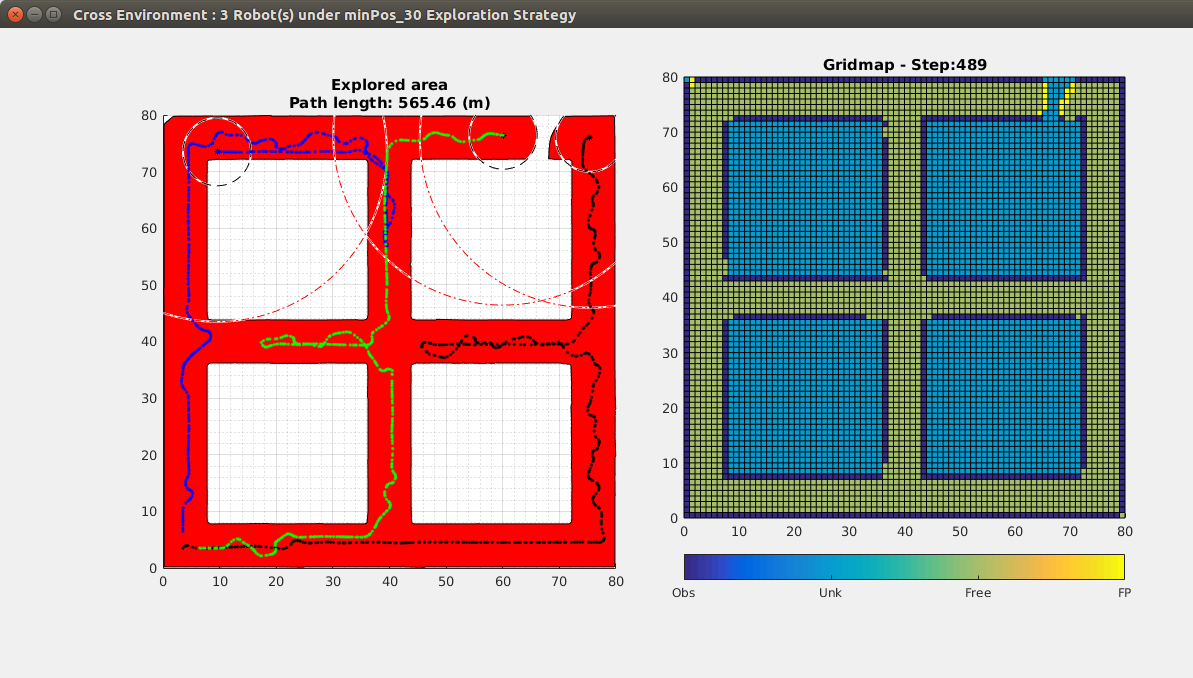
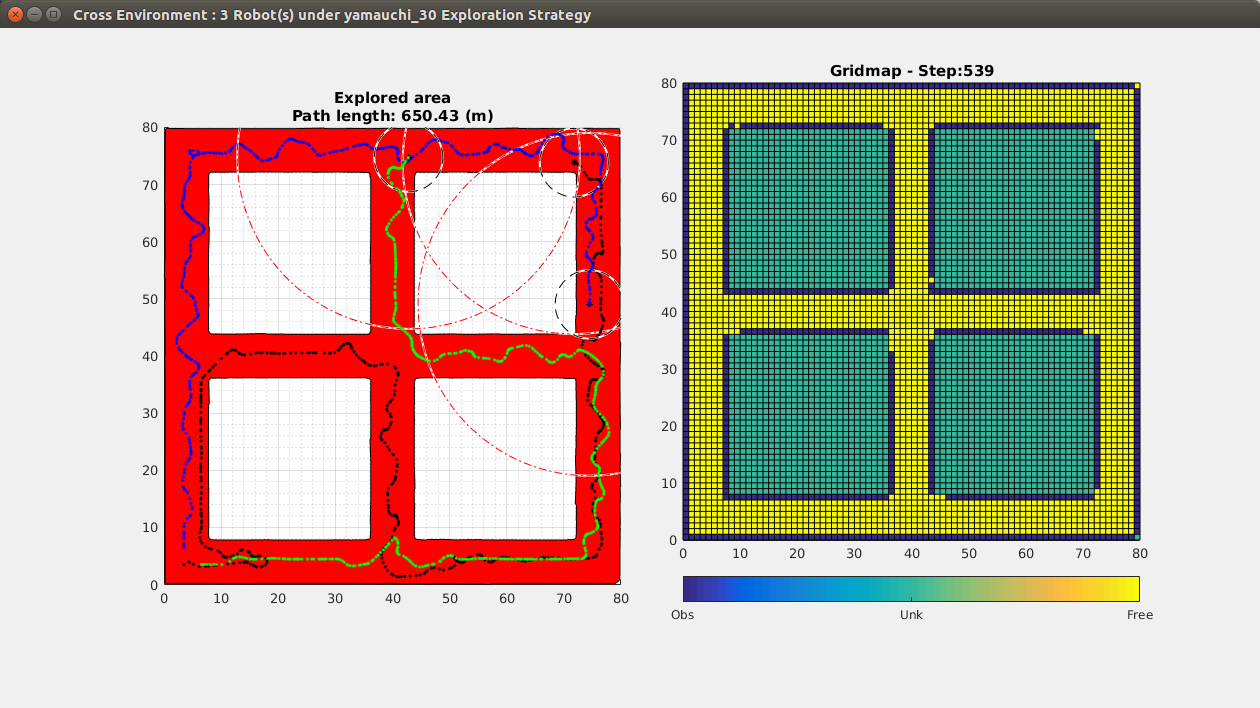
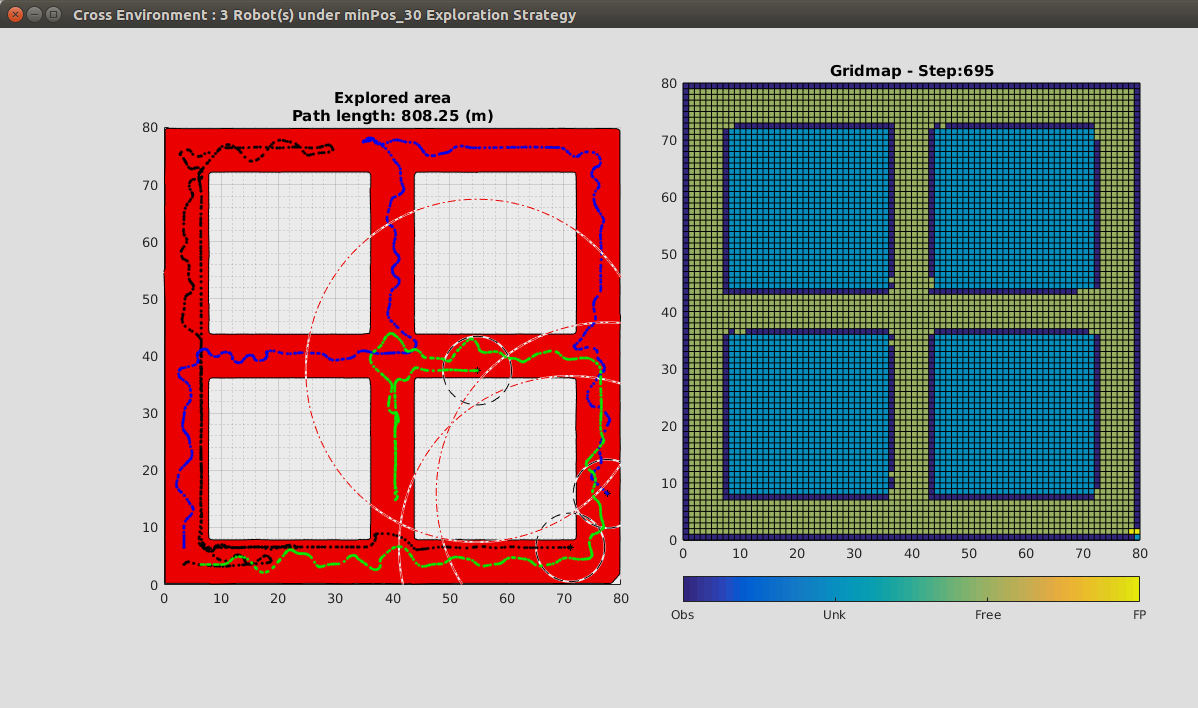
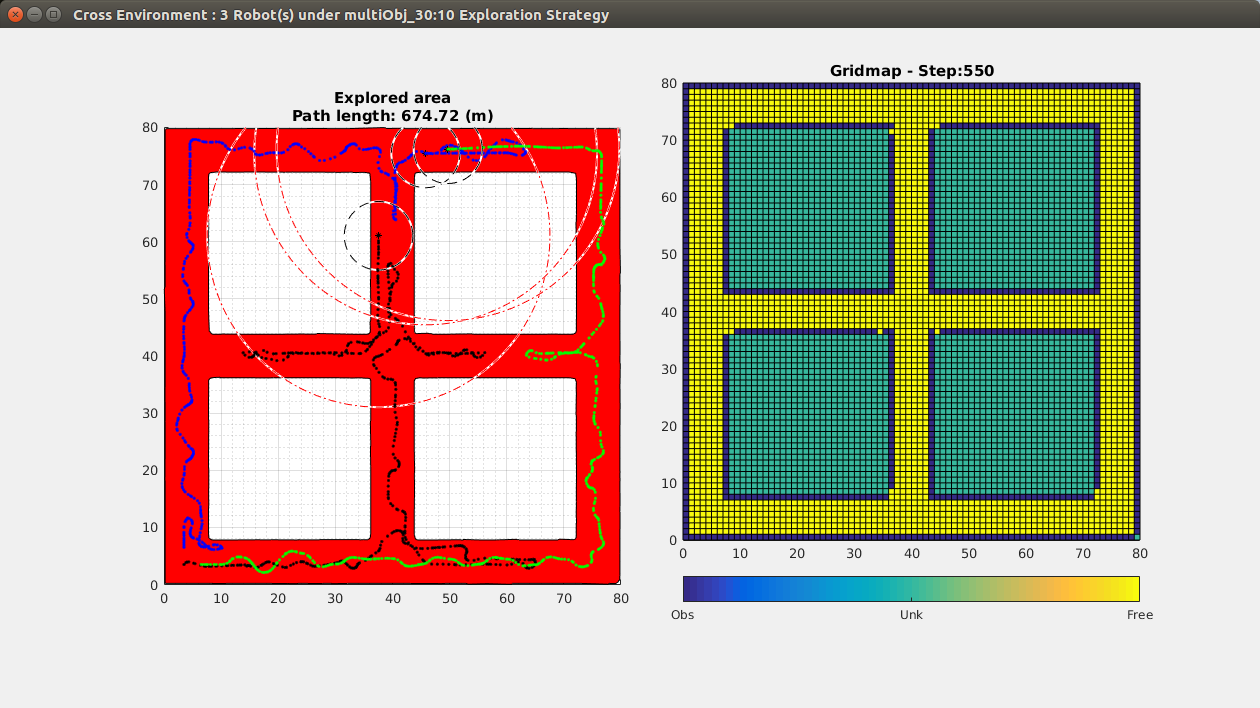
Cross (3 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
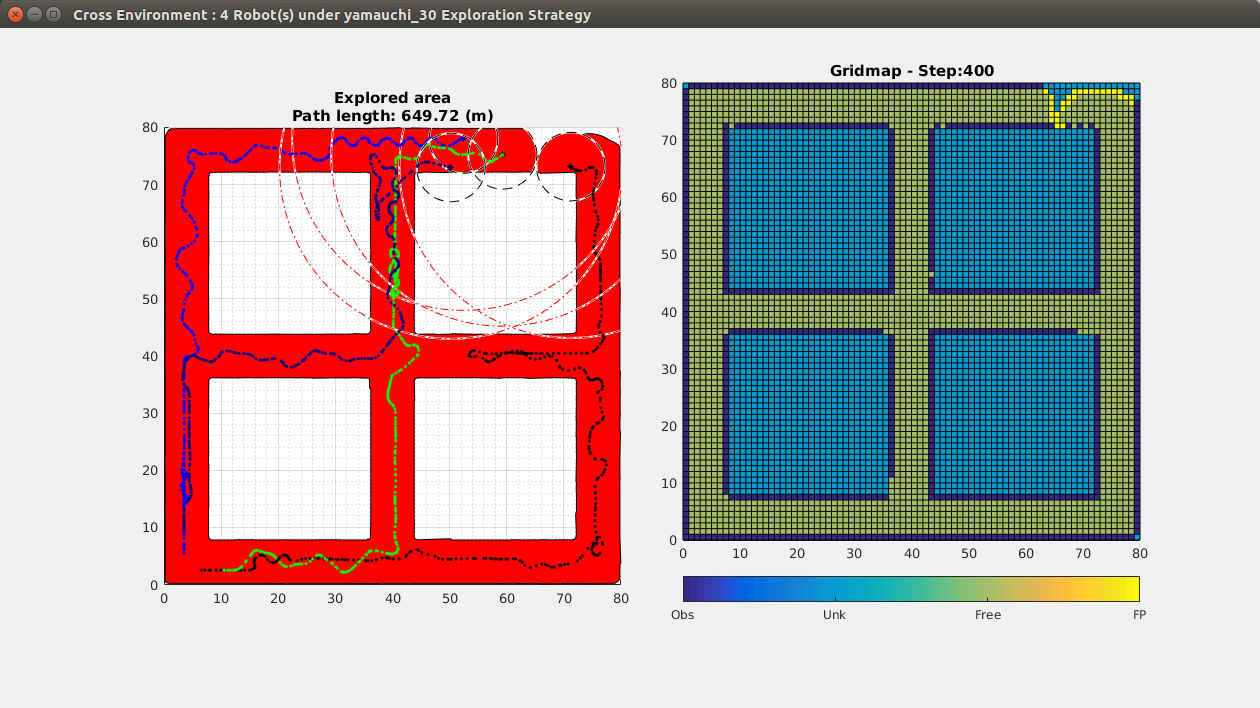
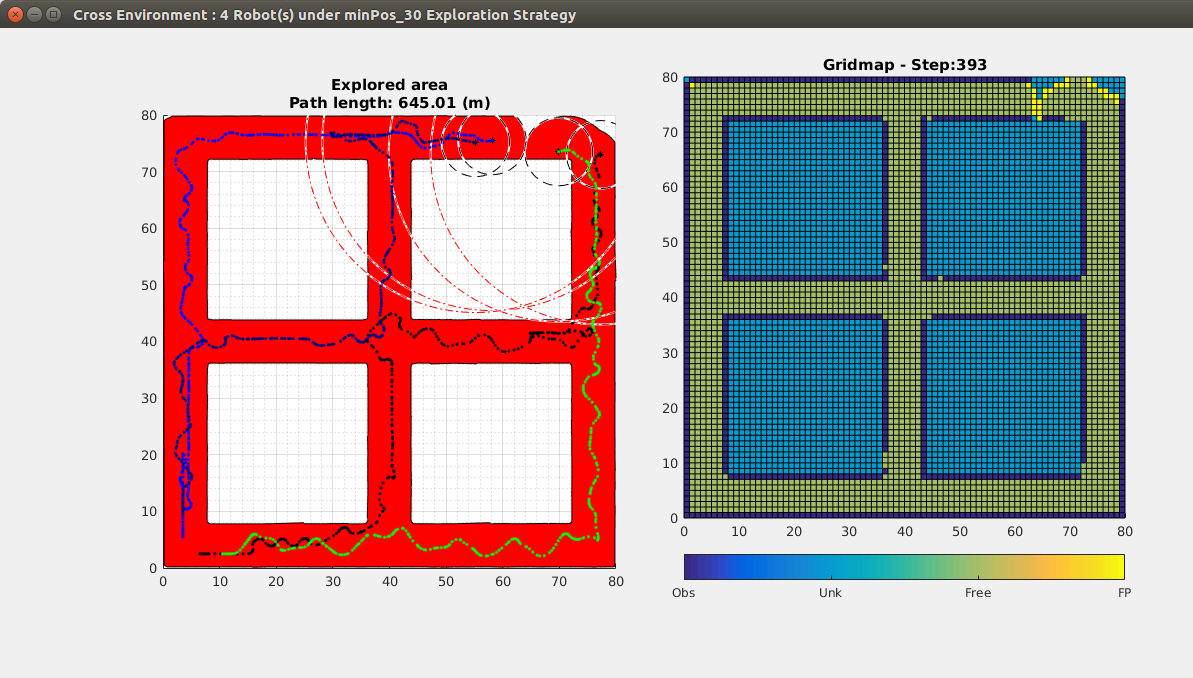
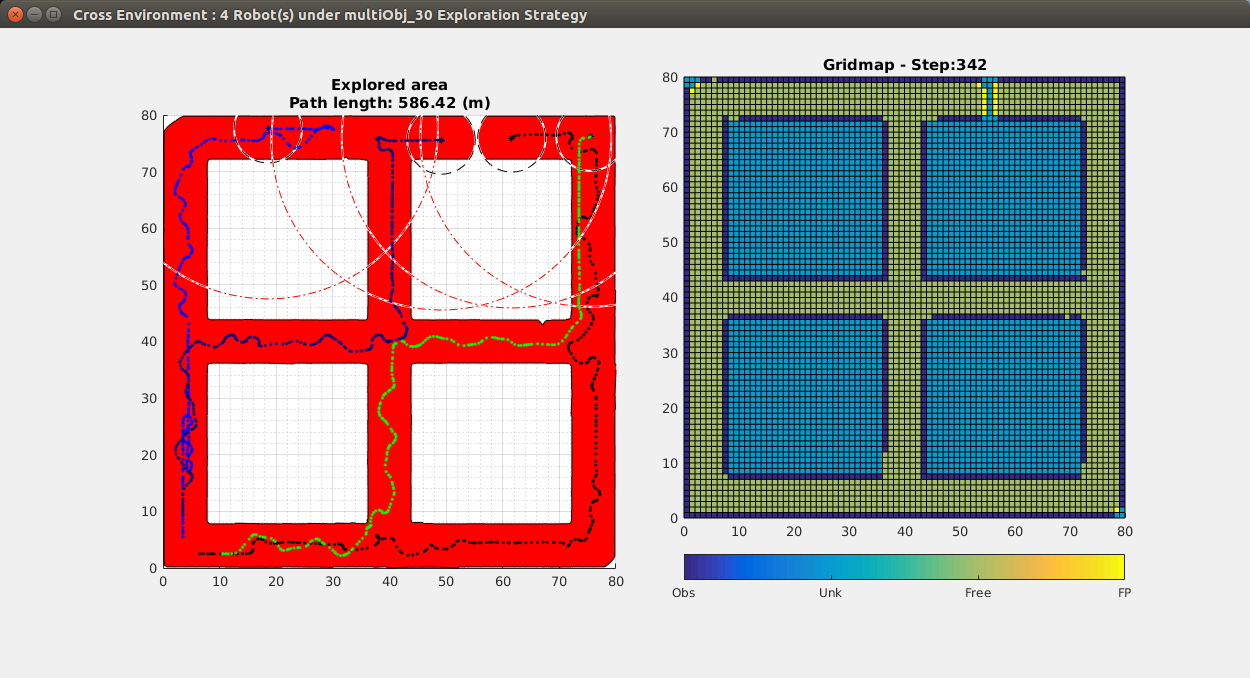
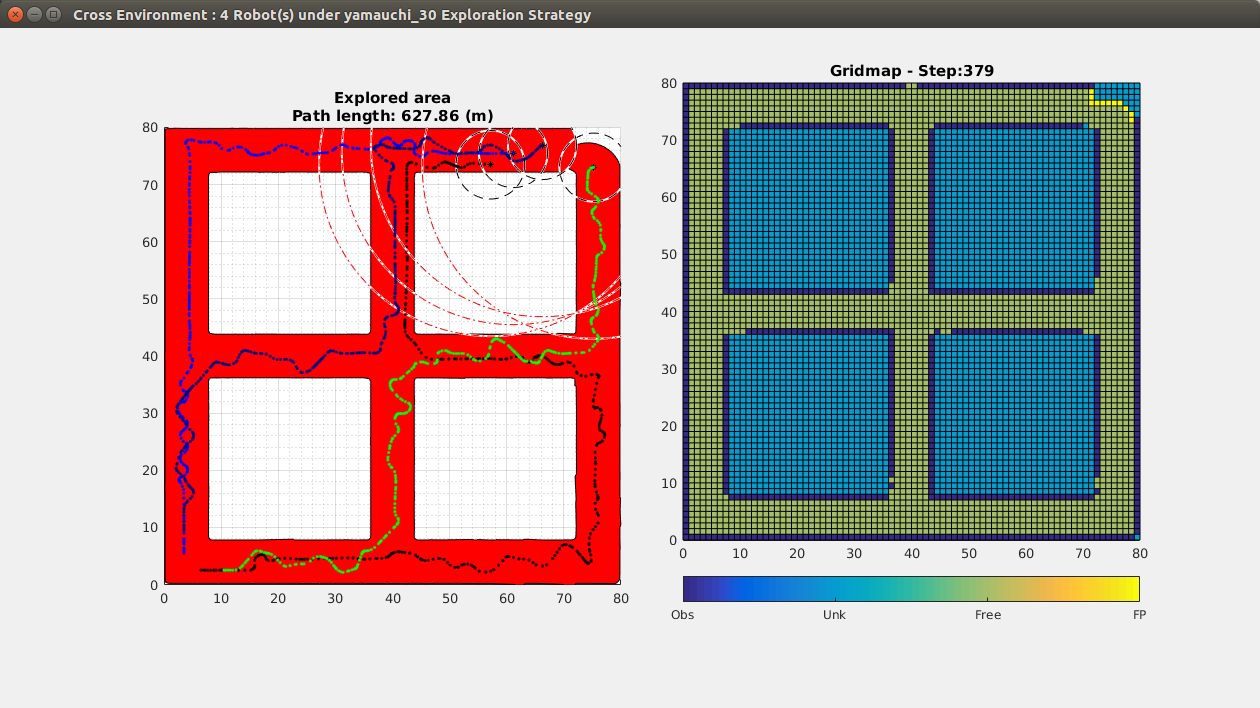
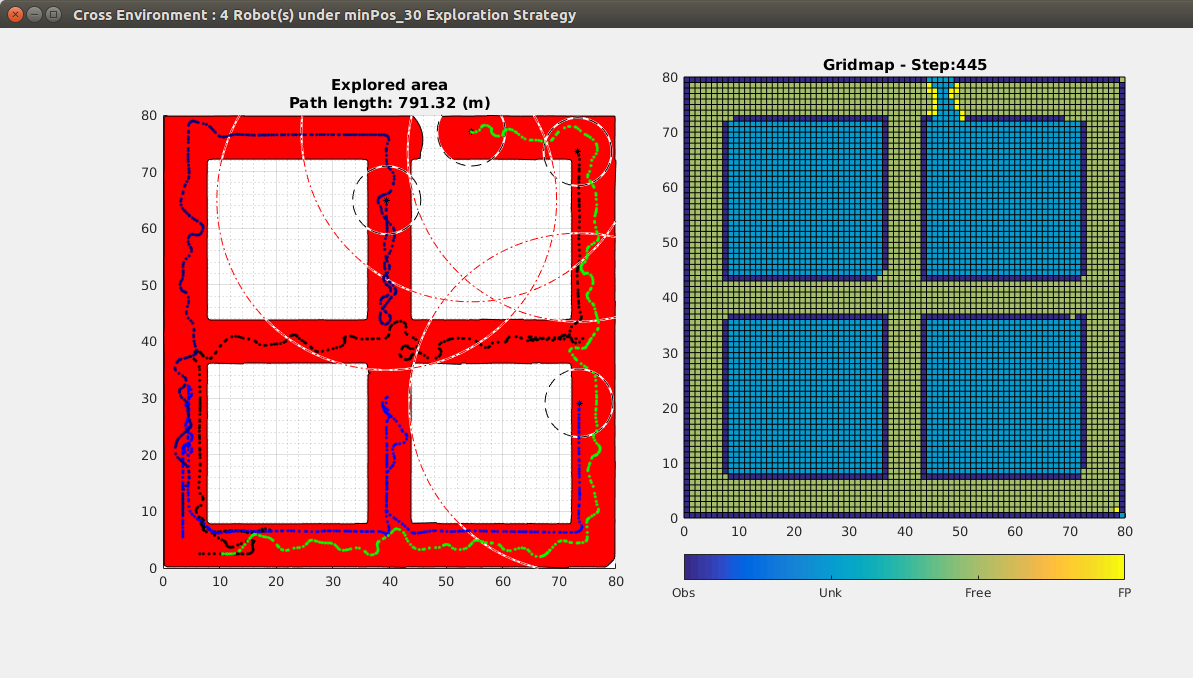
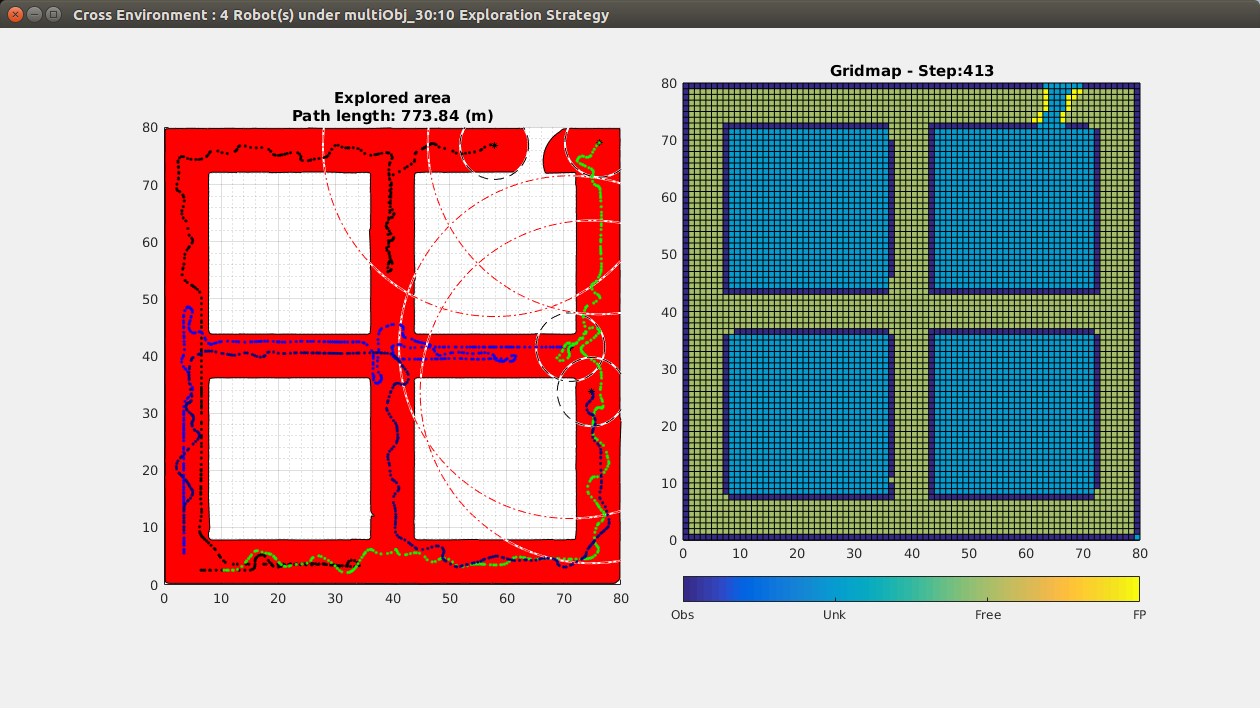
Cross (4 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
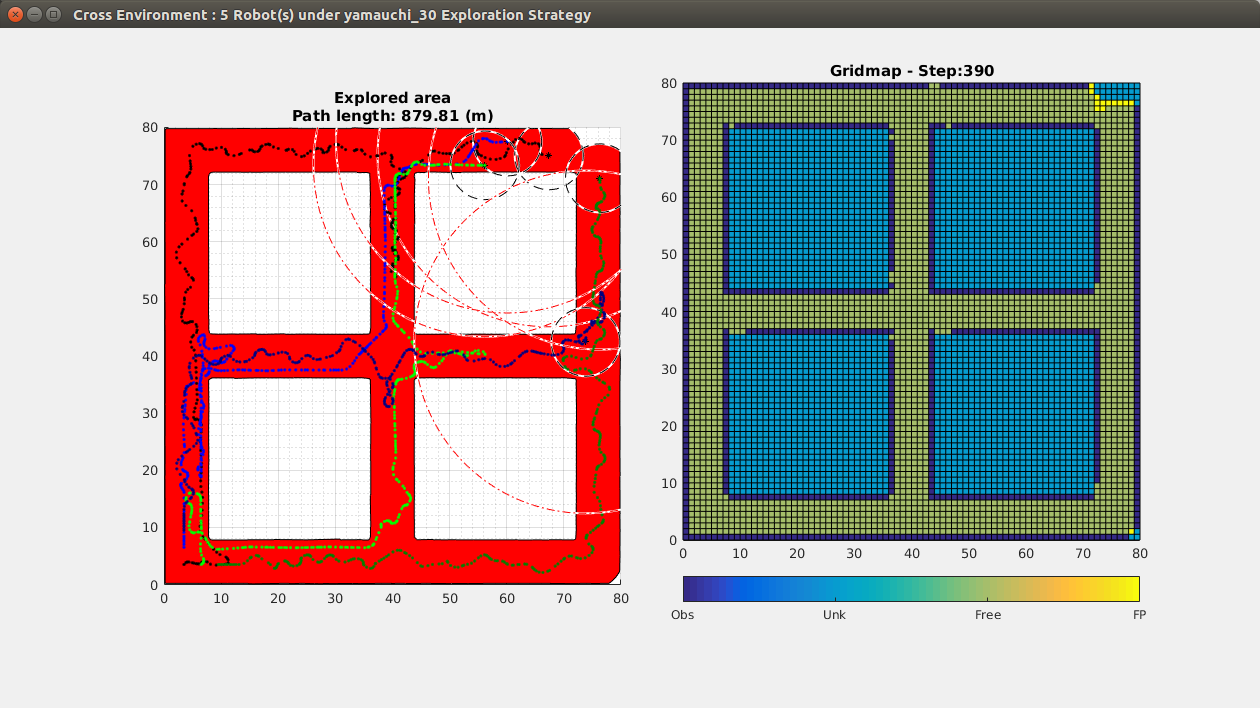
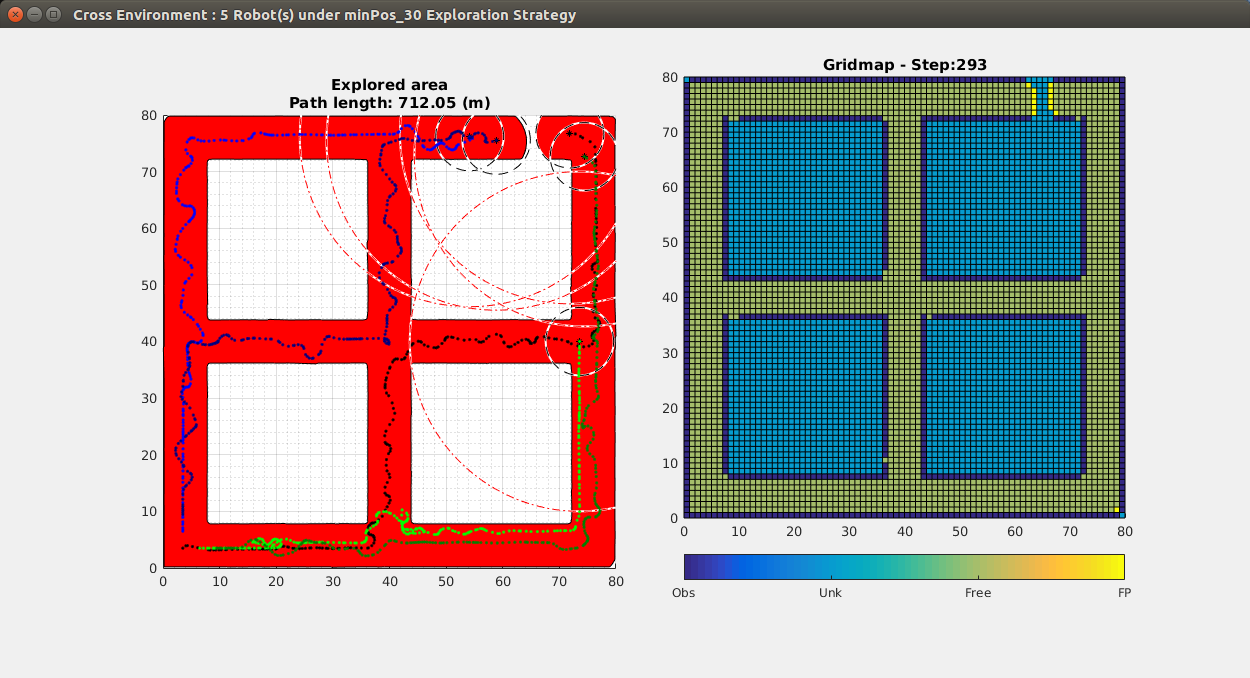
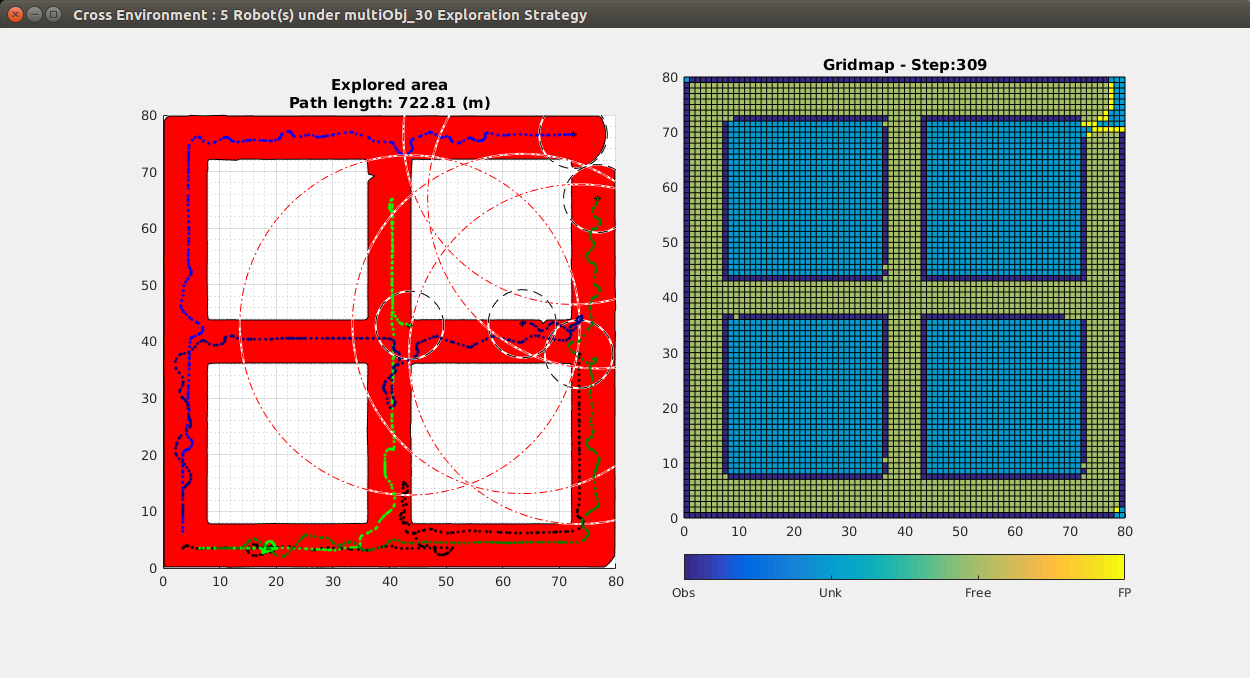
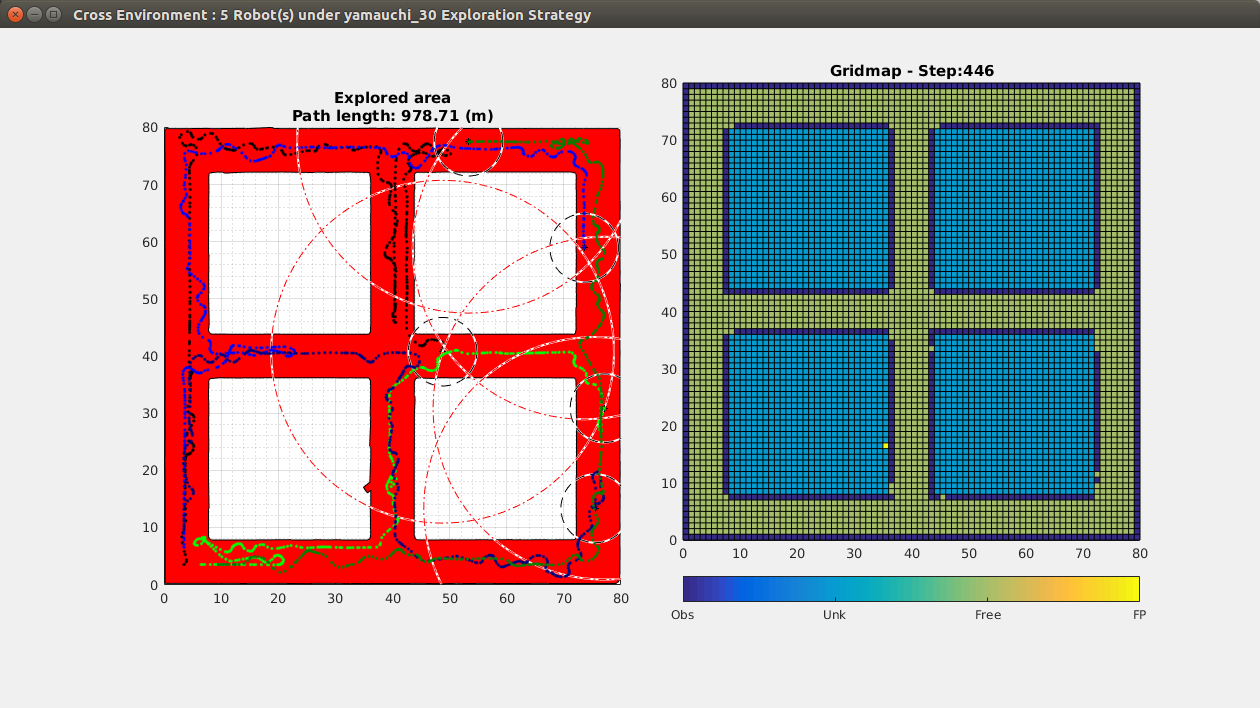
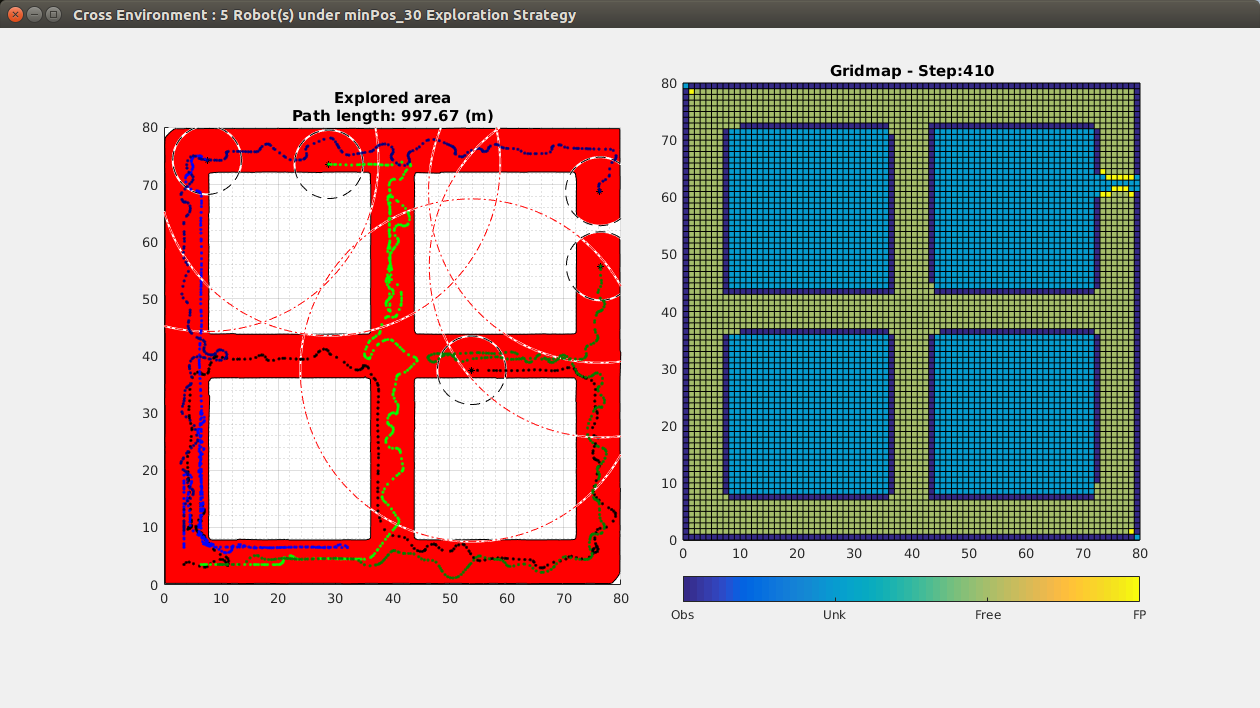
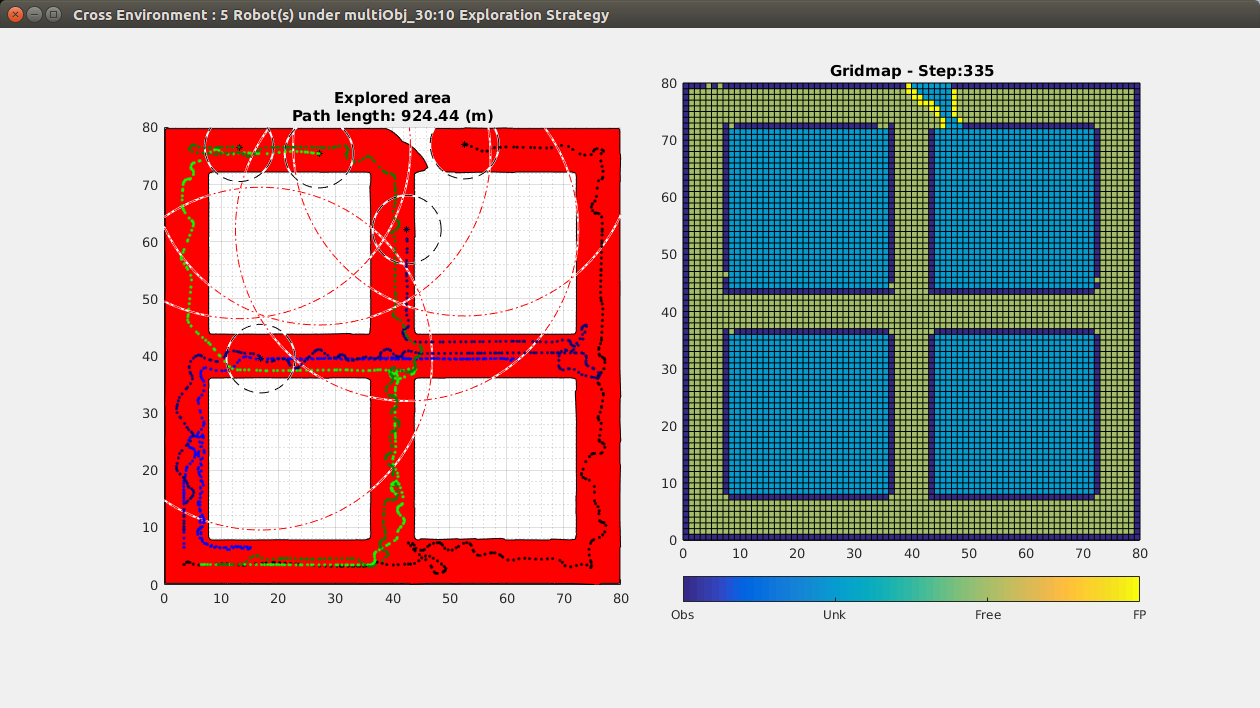
Cross (5 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
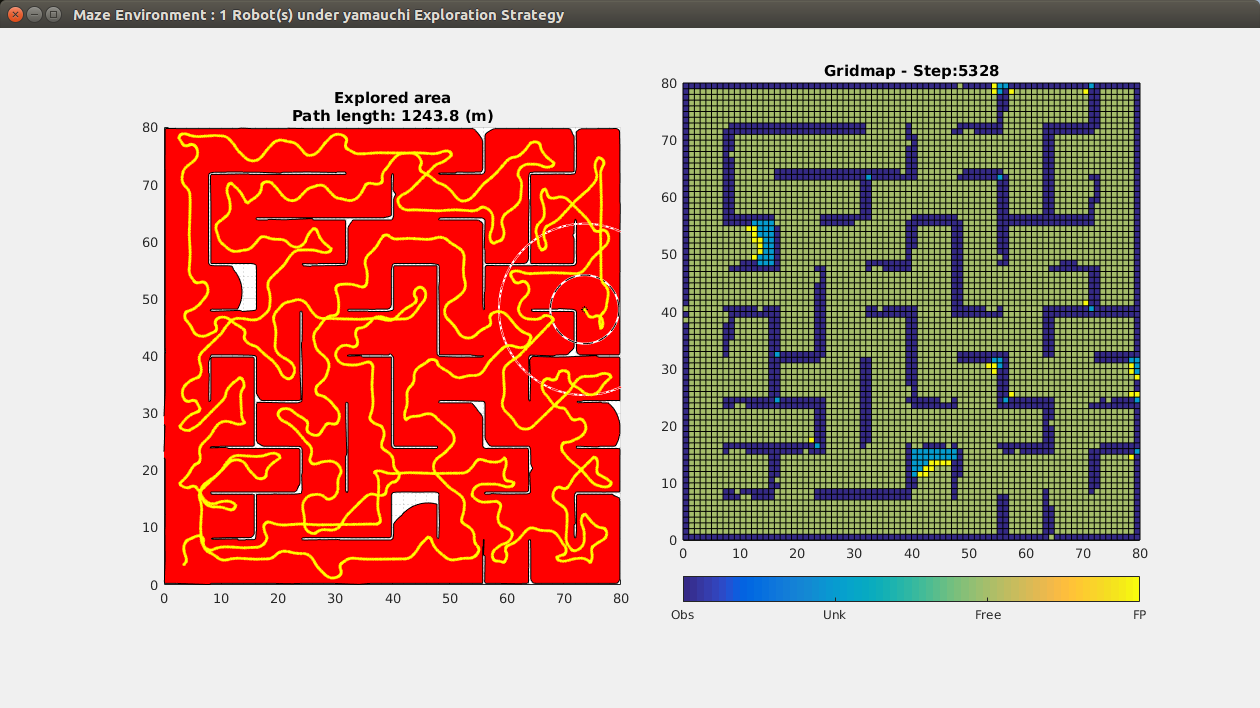
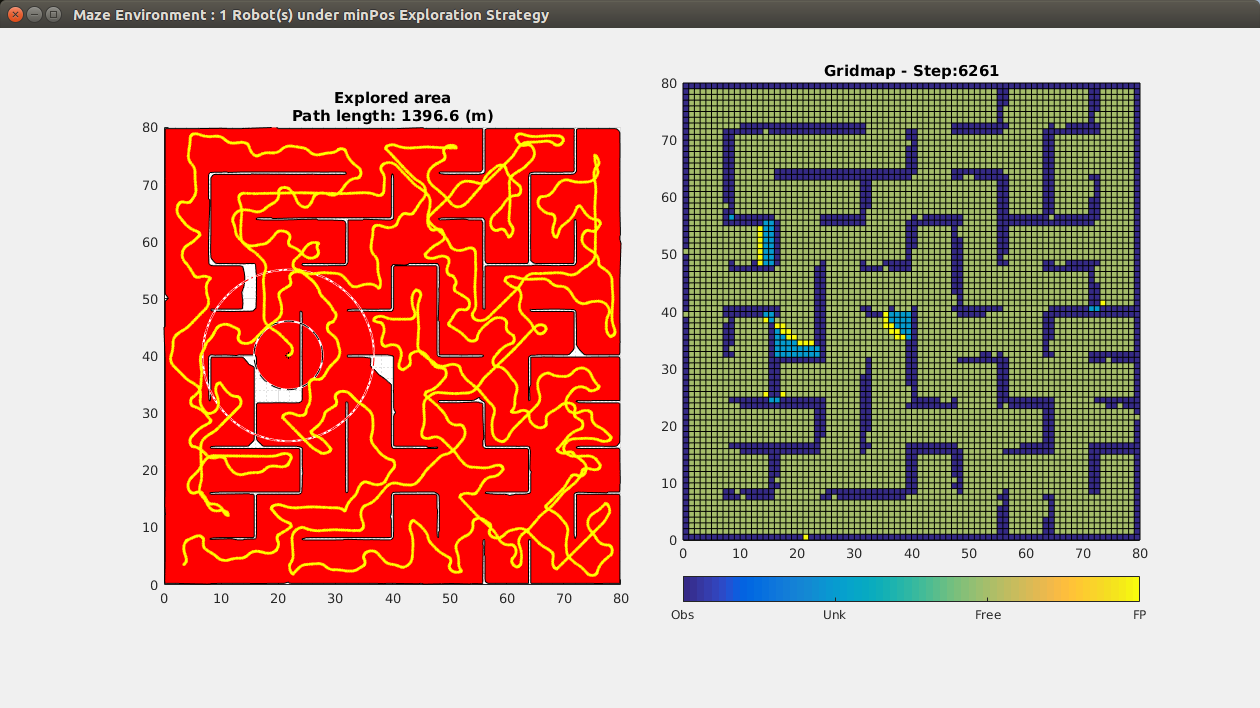
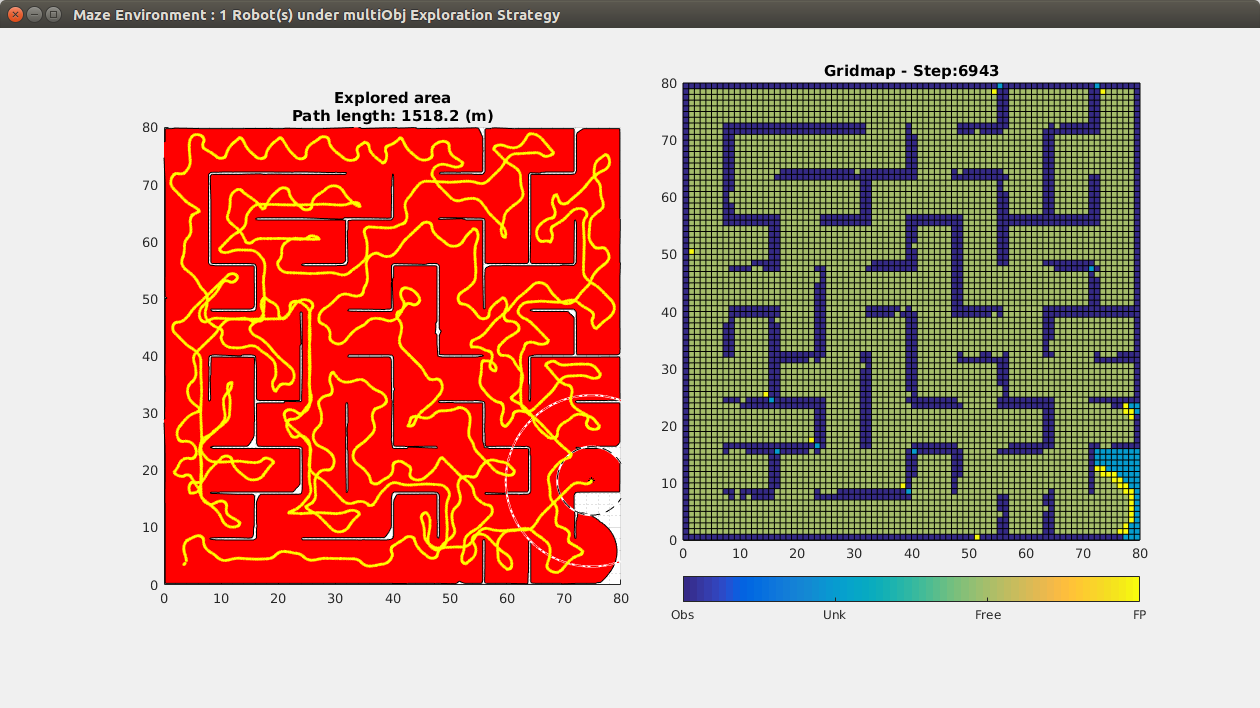
Maze (1 robot)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
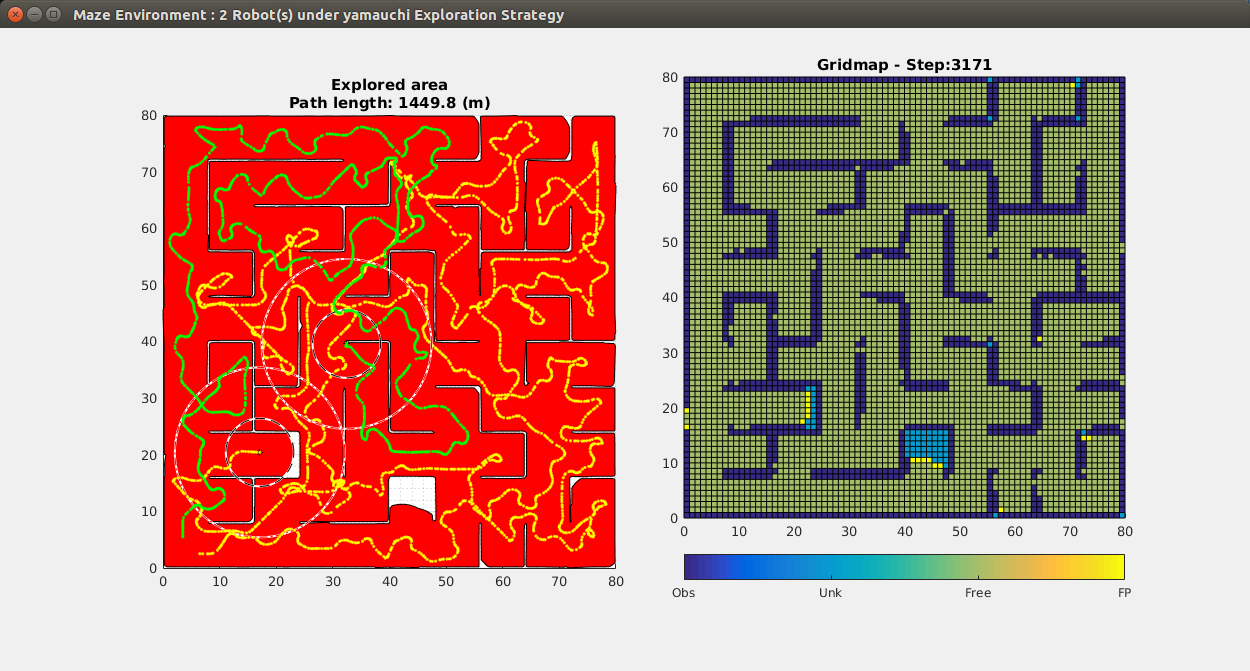
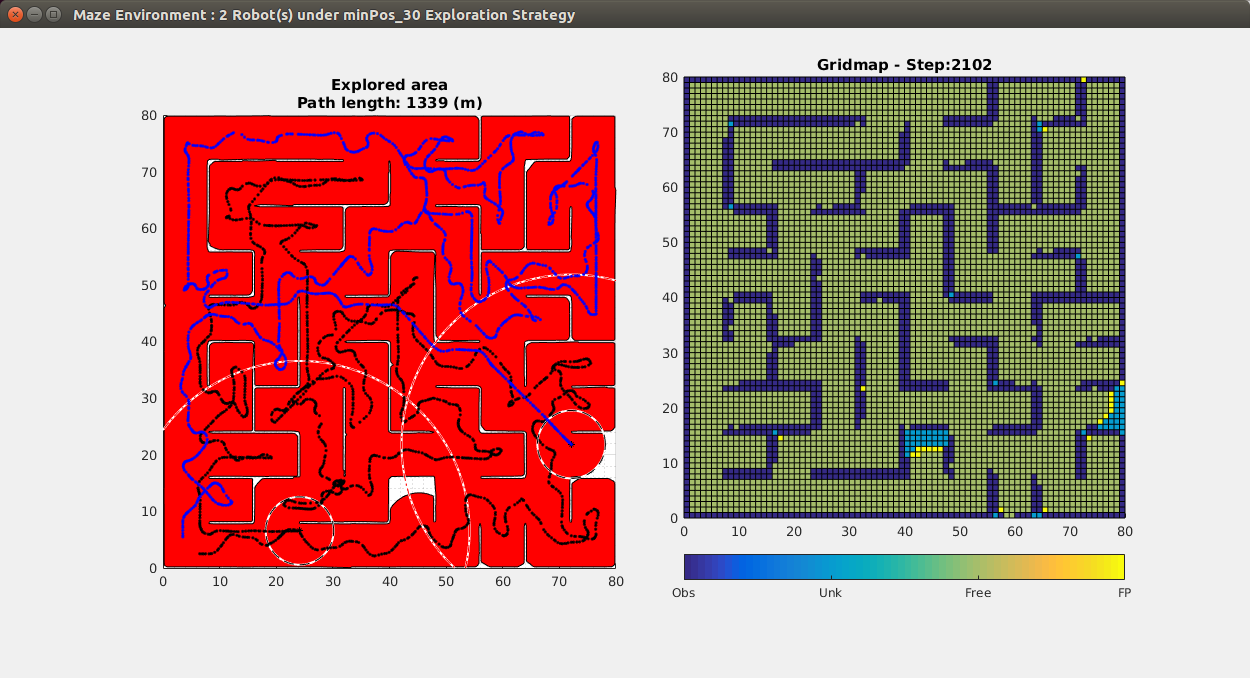
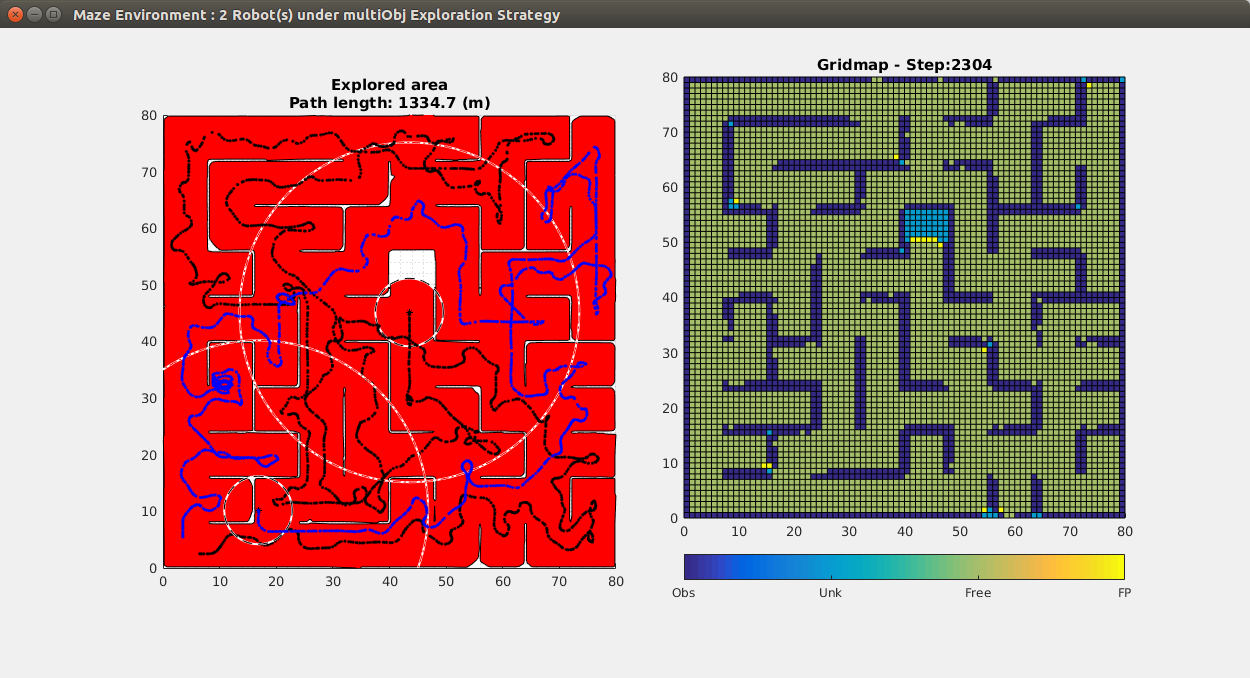
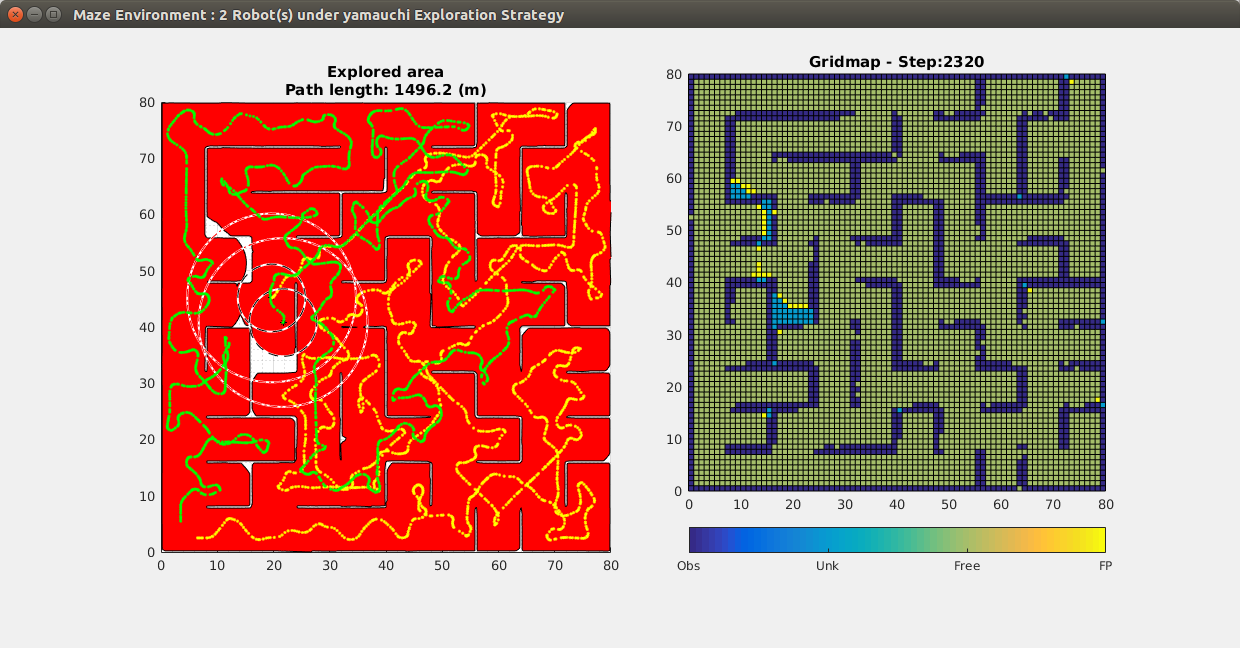
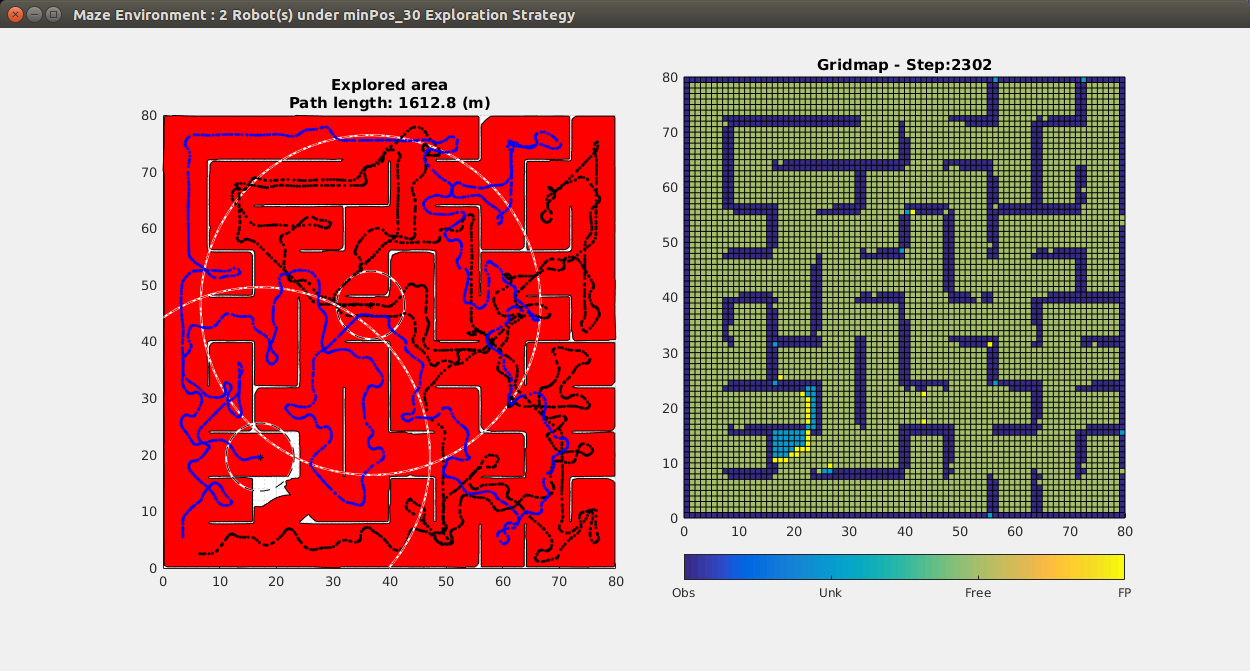
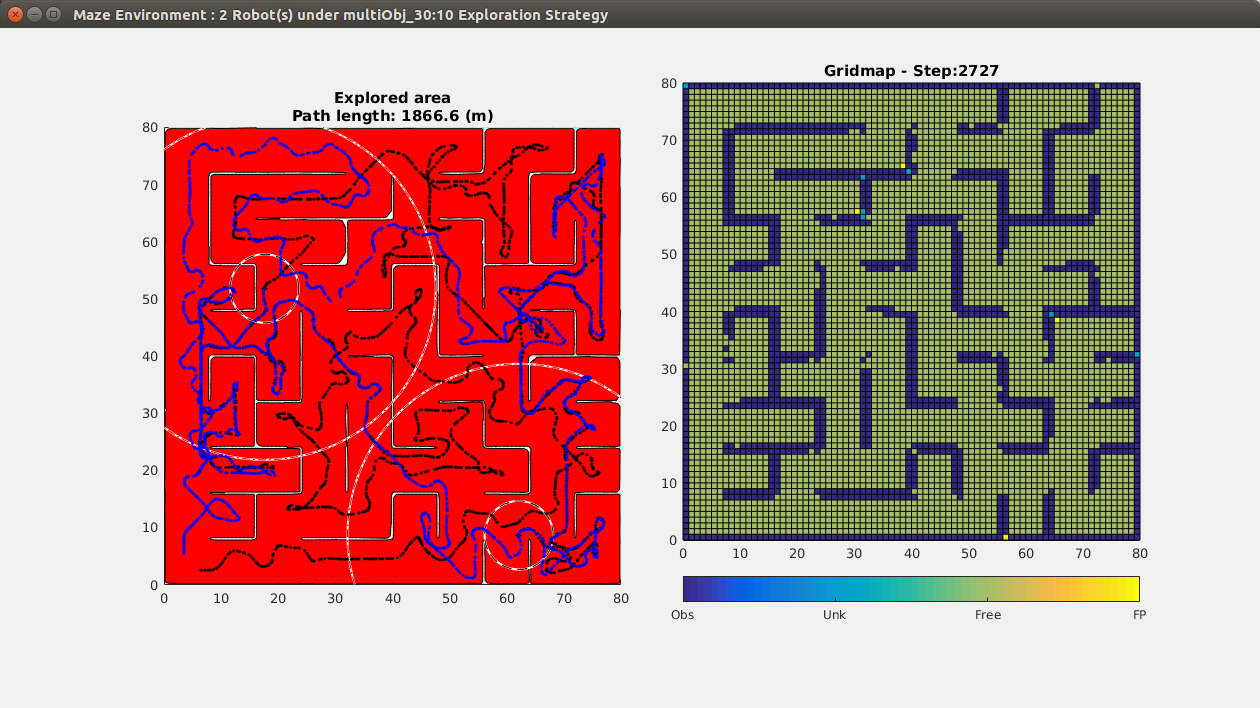
Maze (2 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
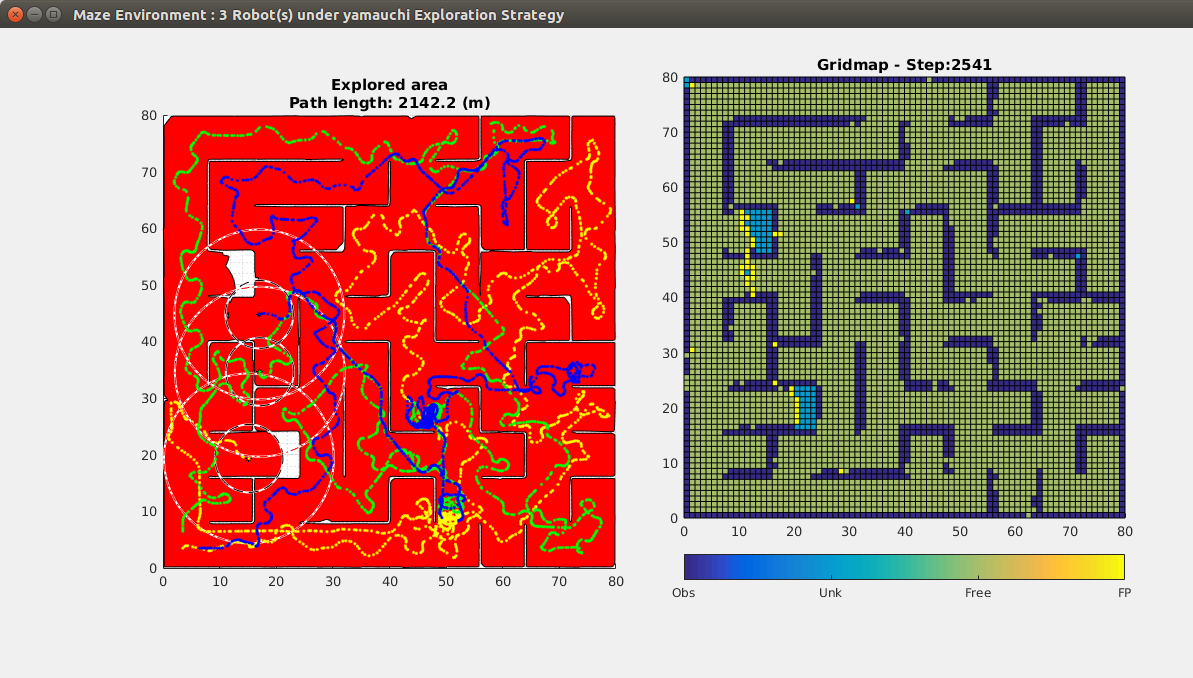
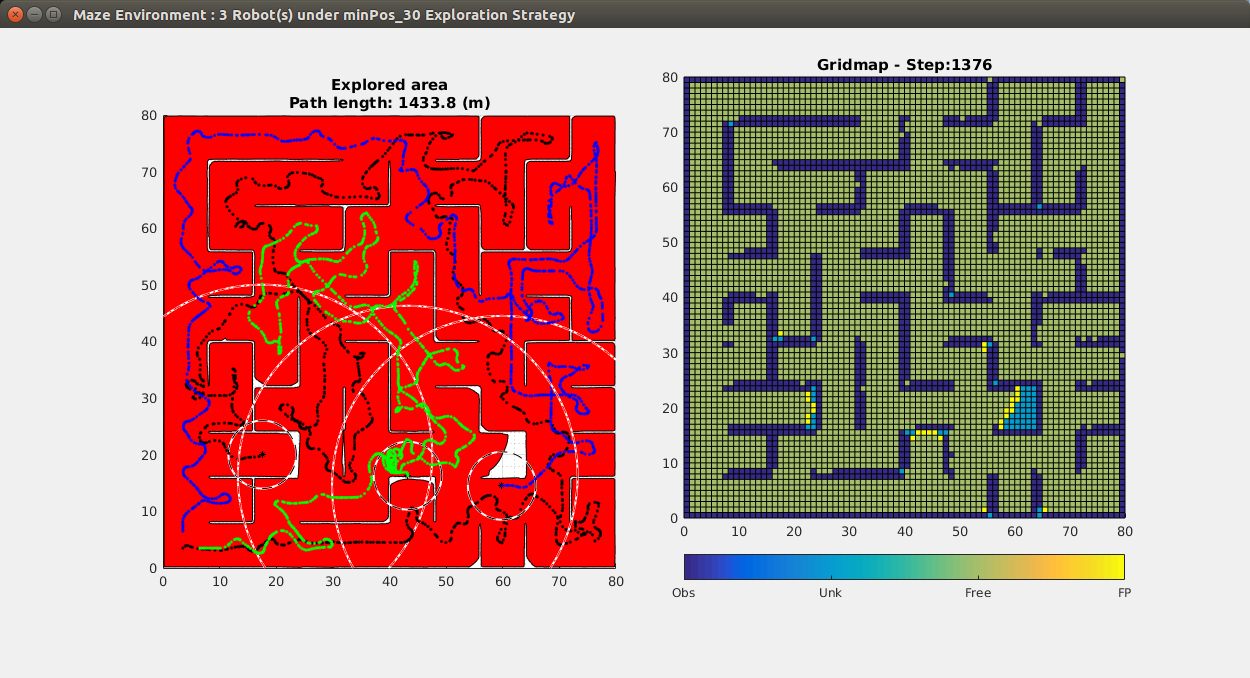
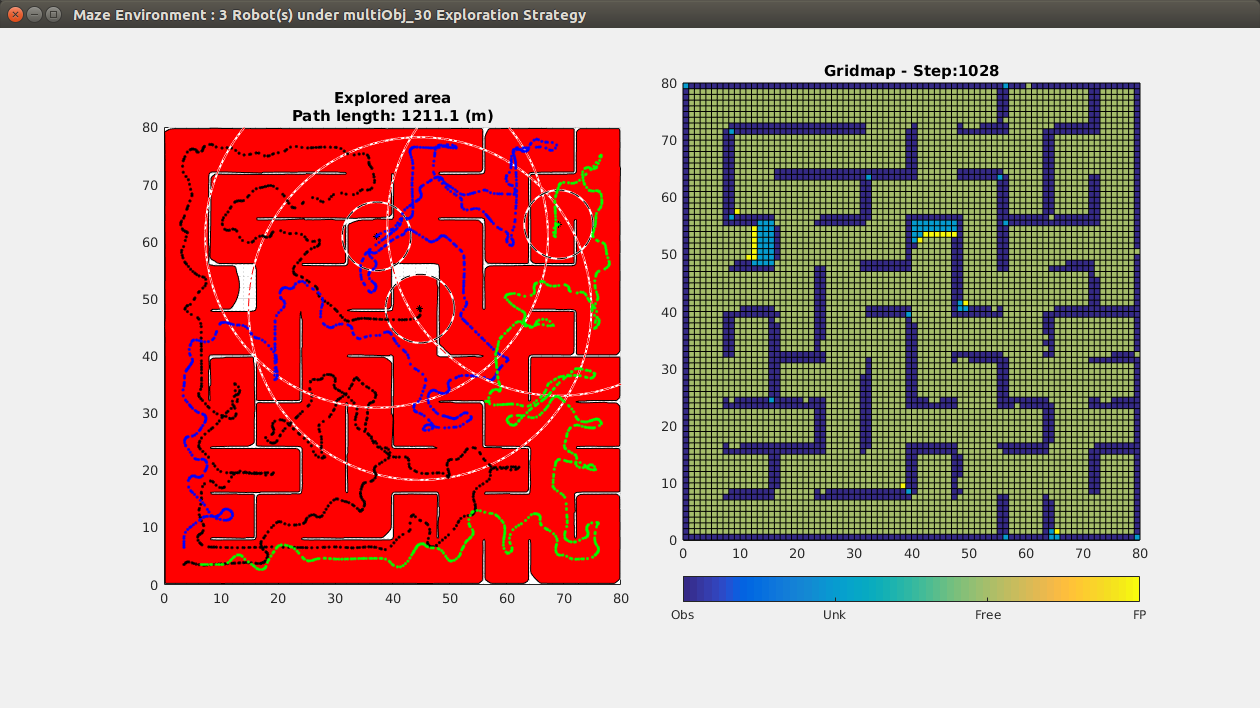
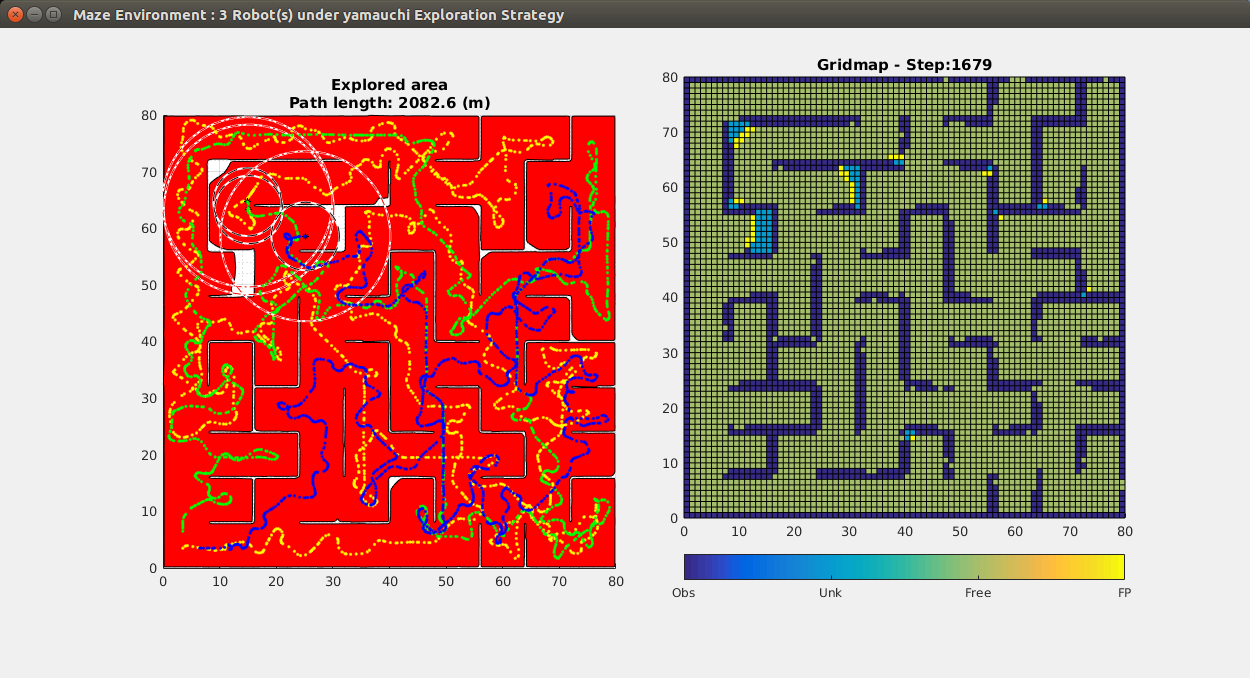
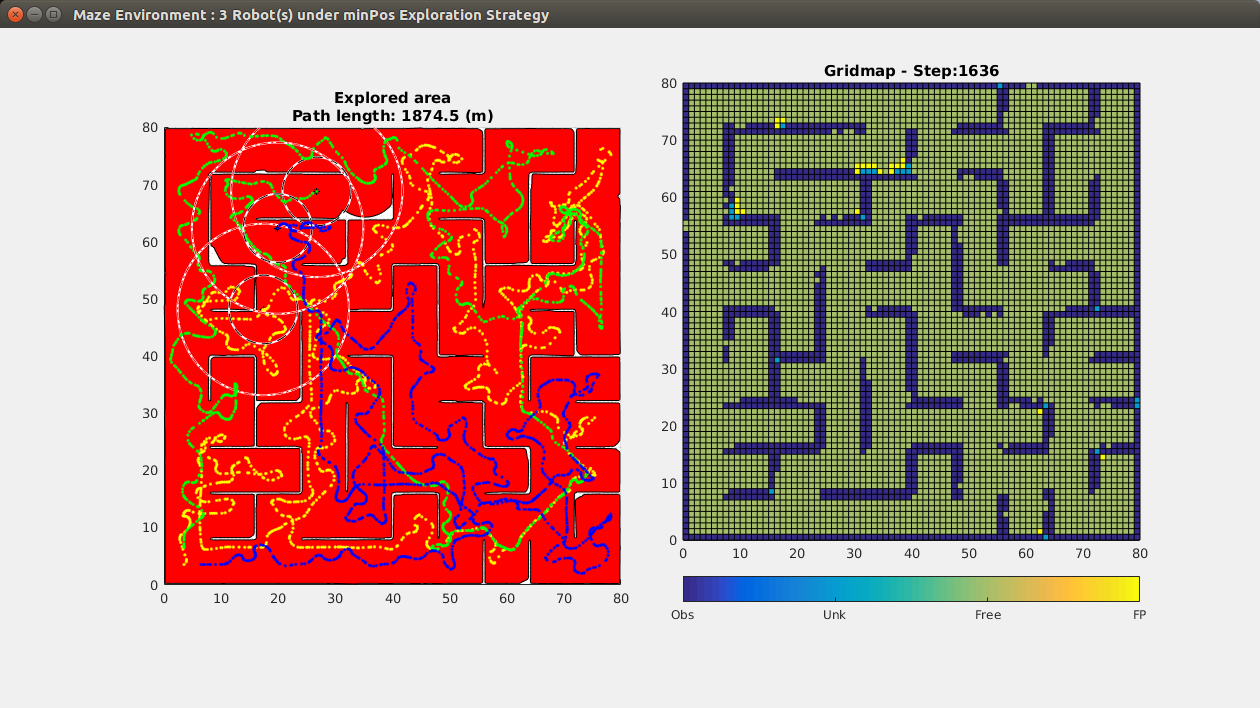
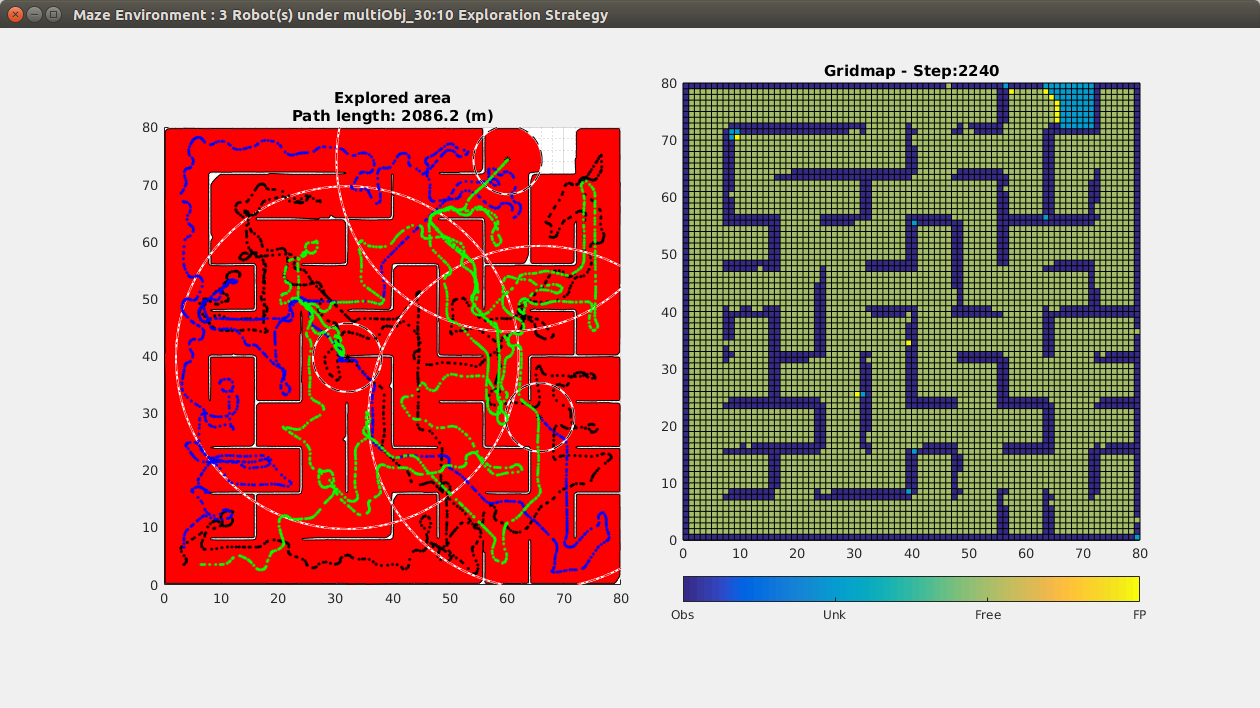
Maze (3 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
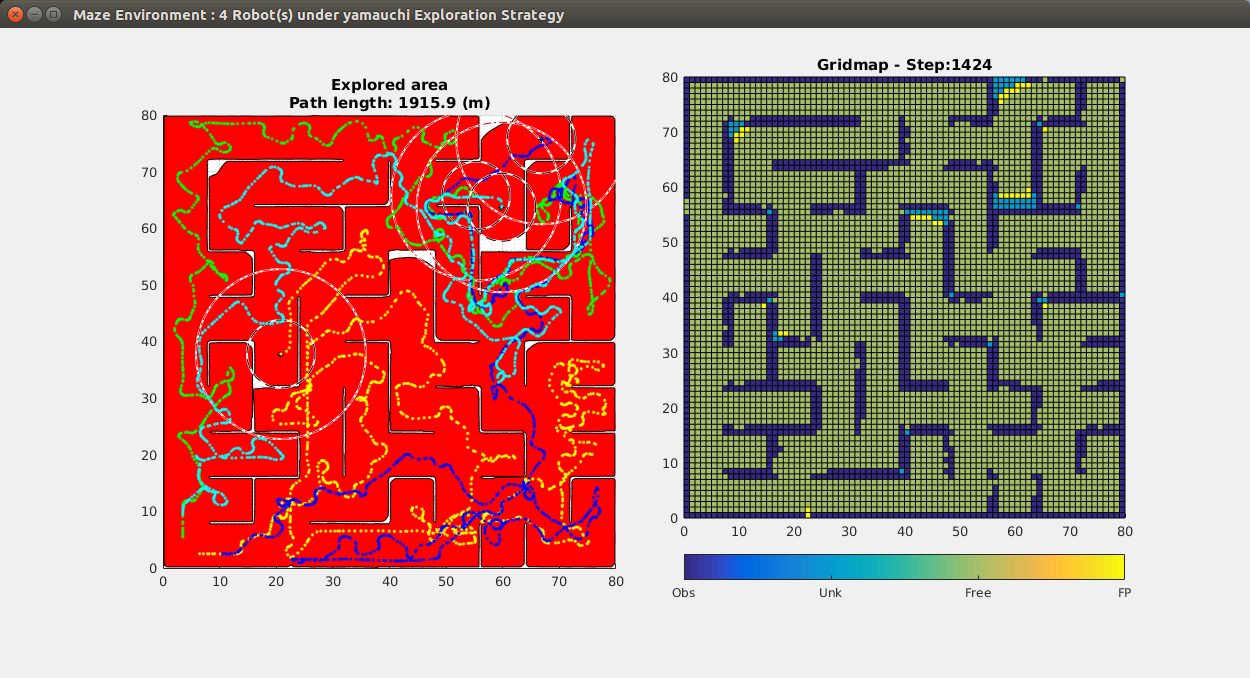
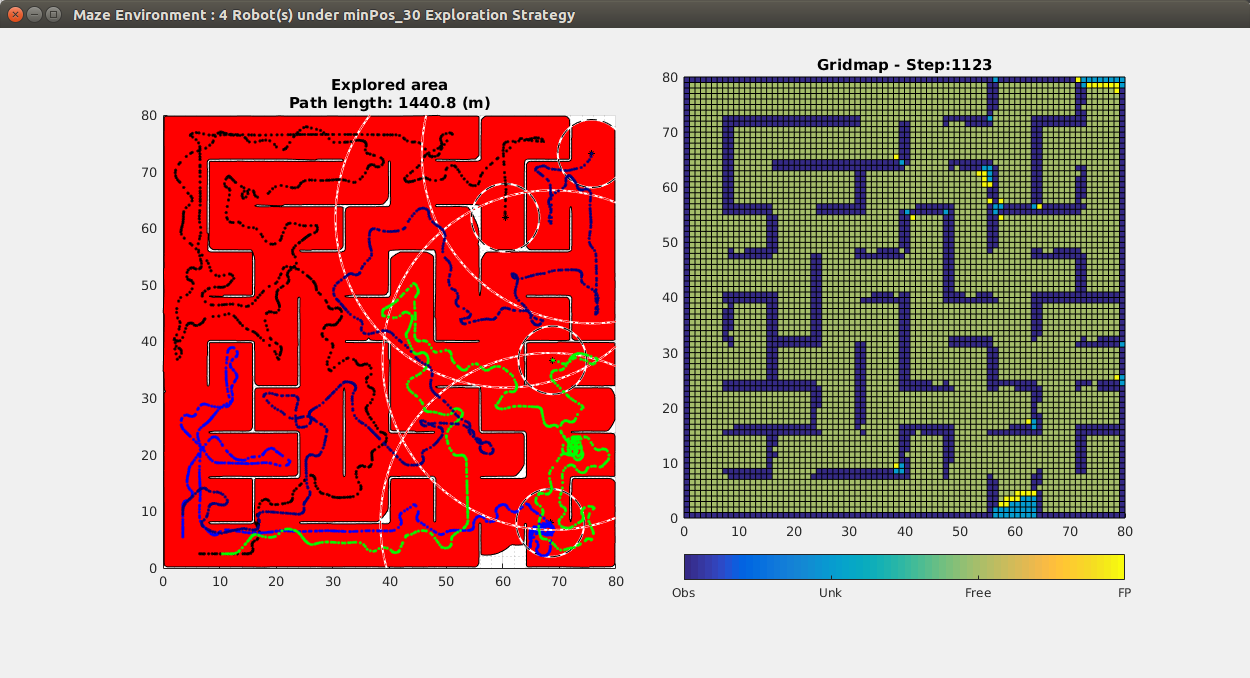
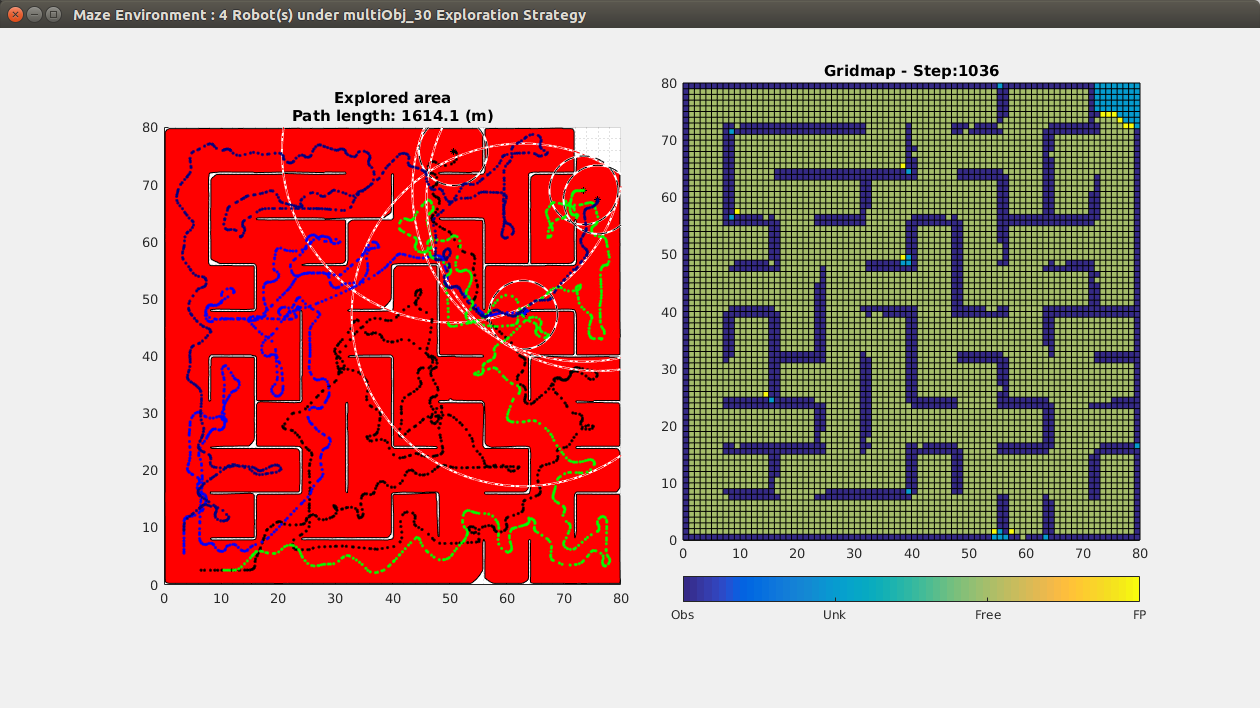
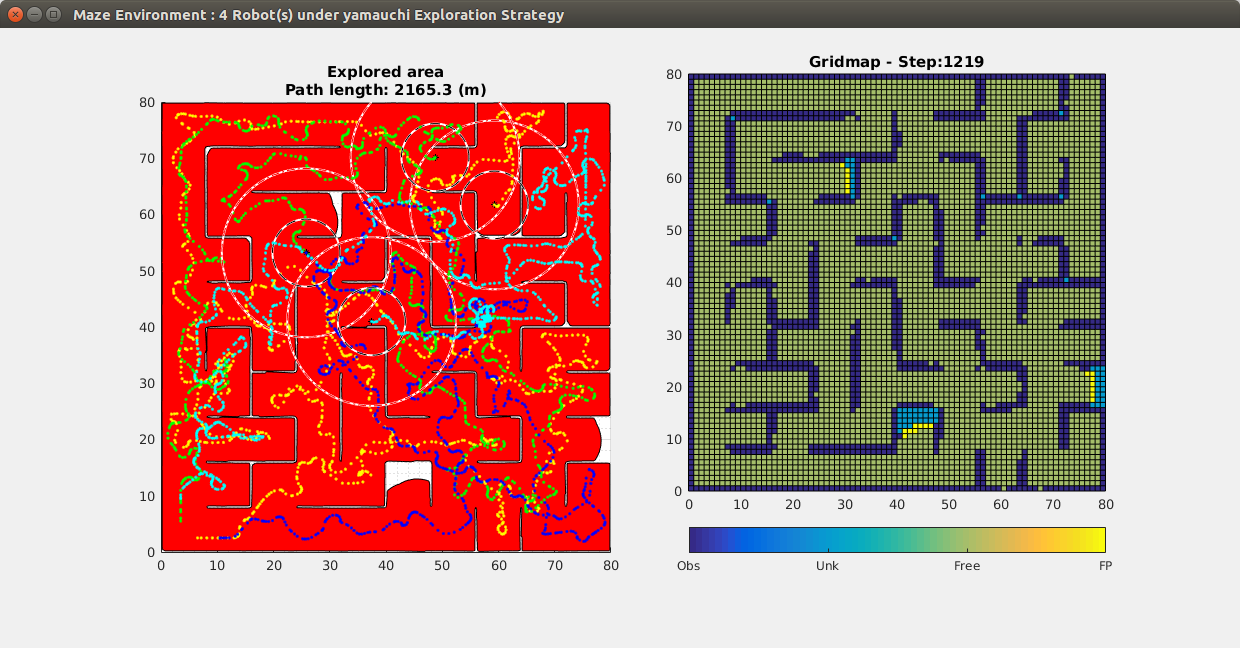
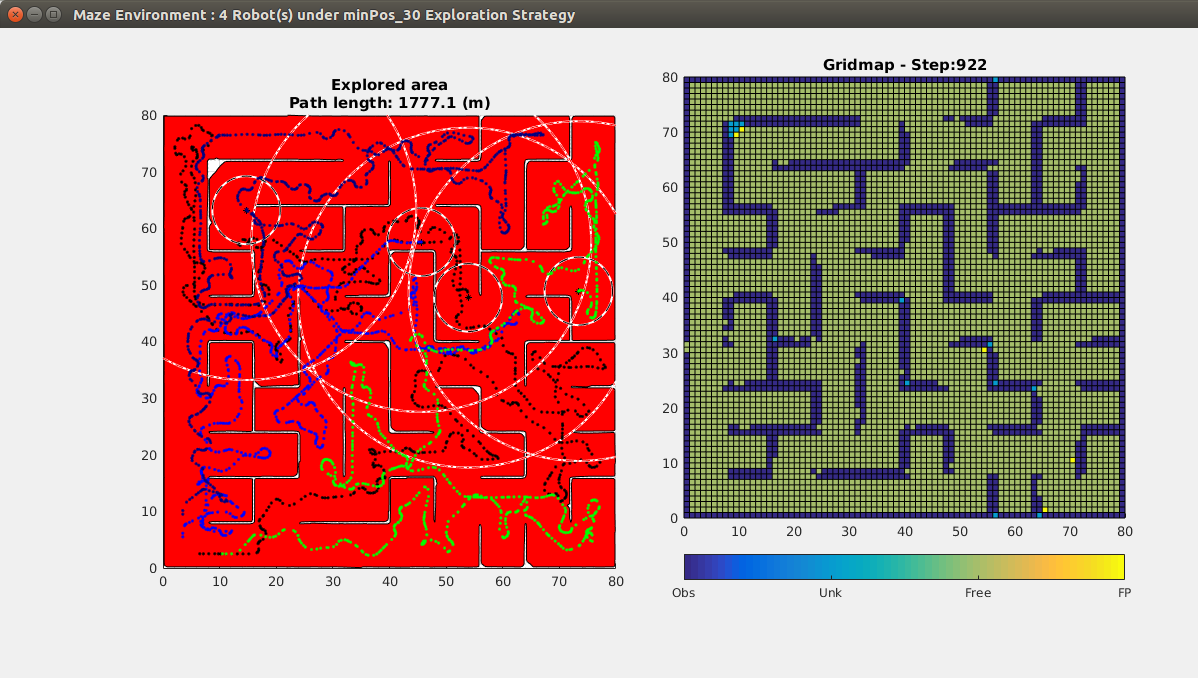
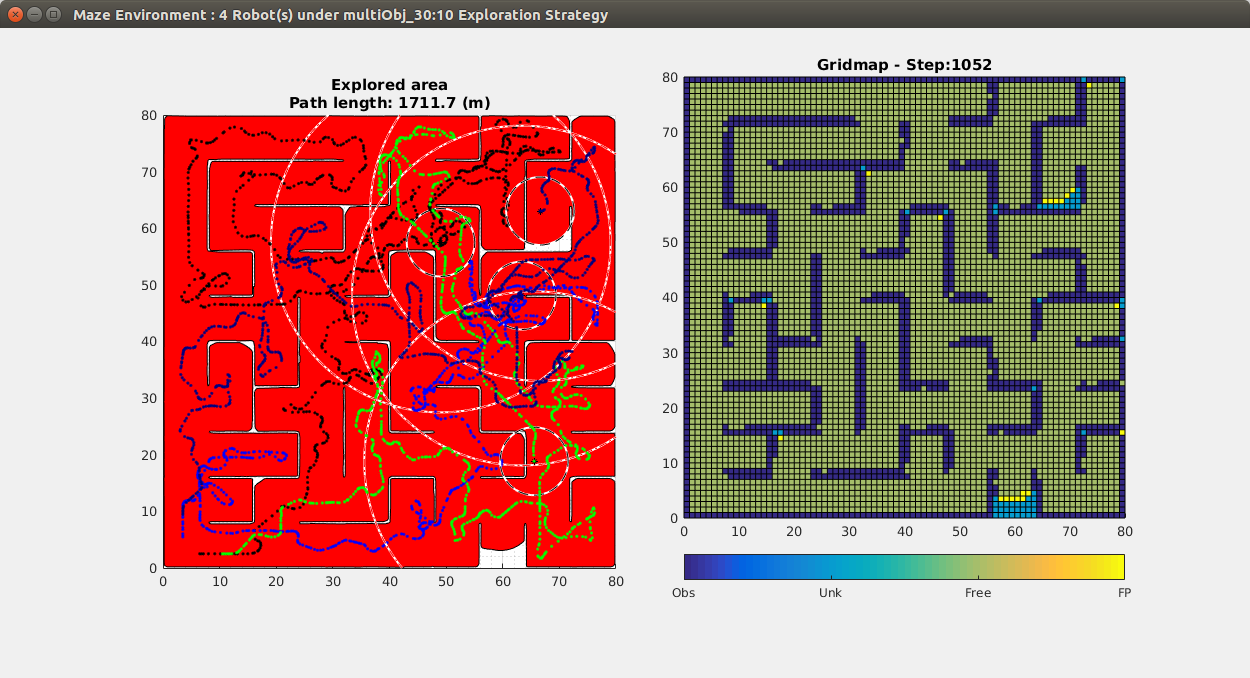
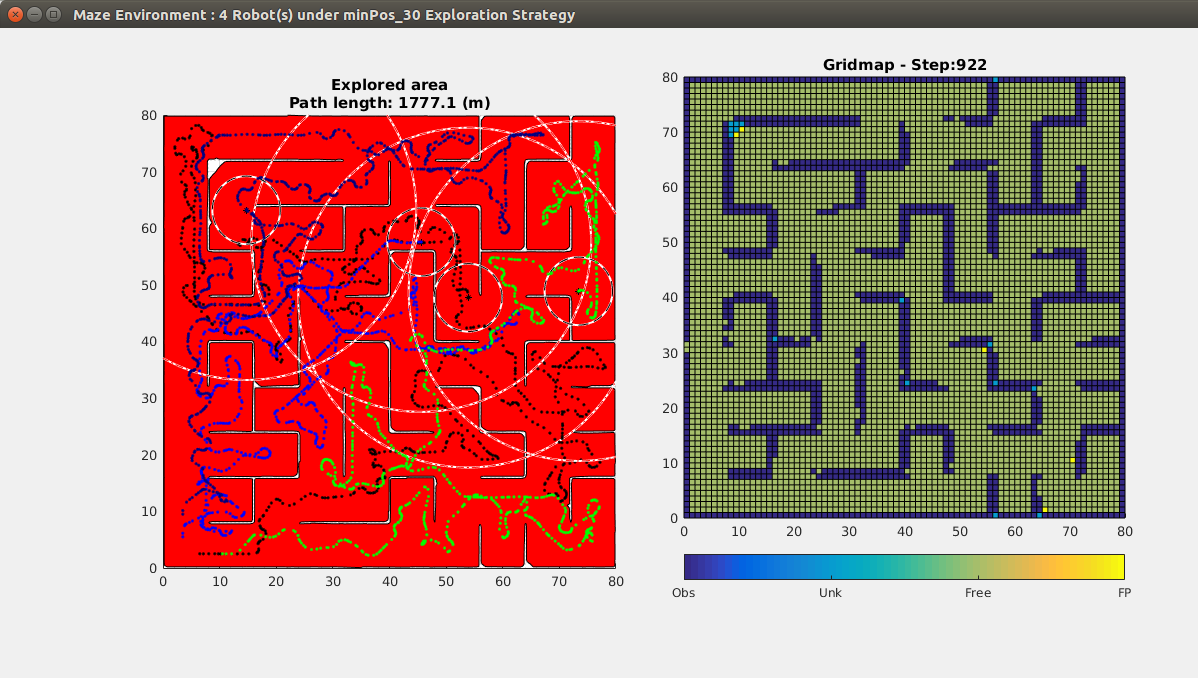
Maze (4 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |
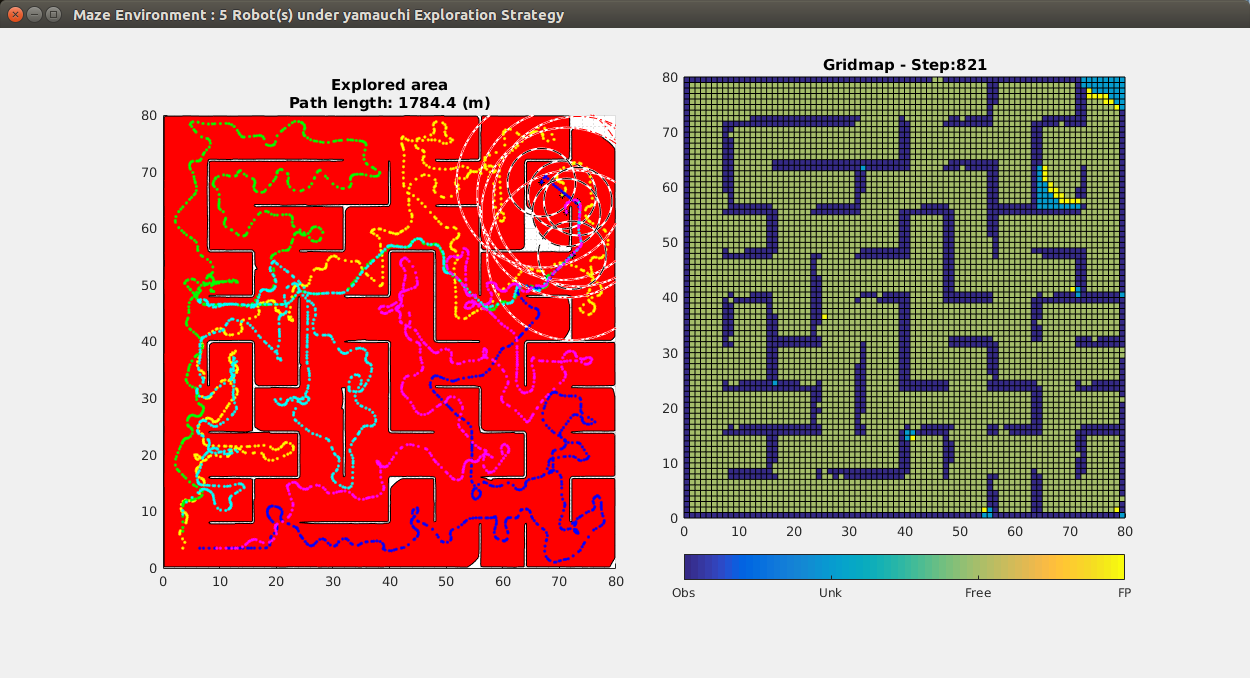
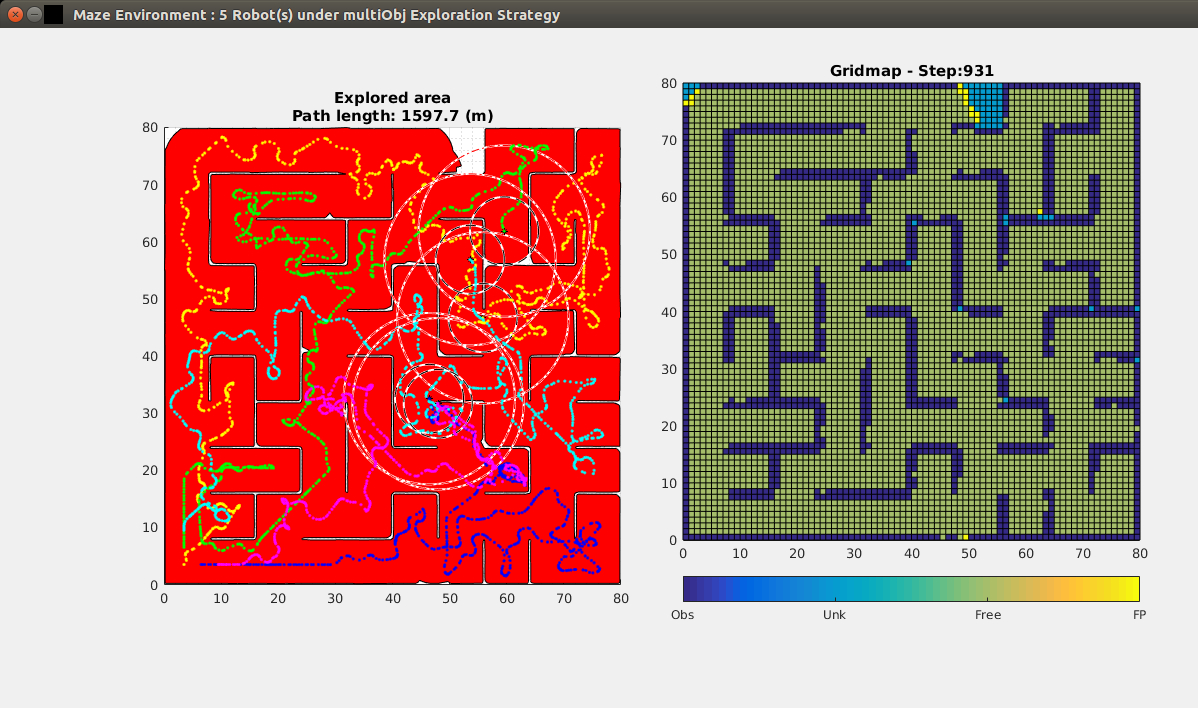
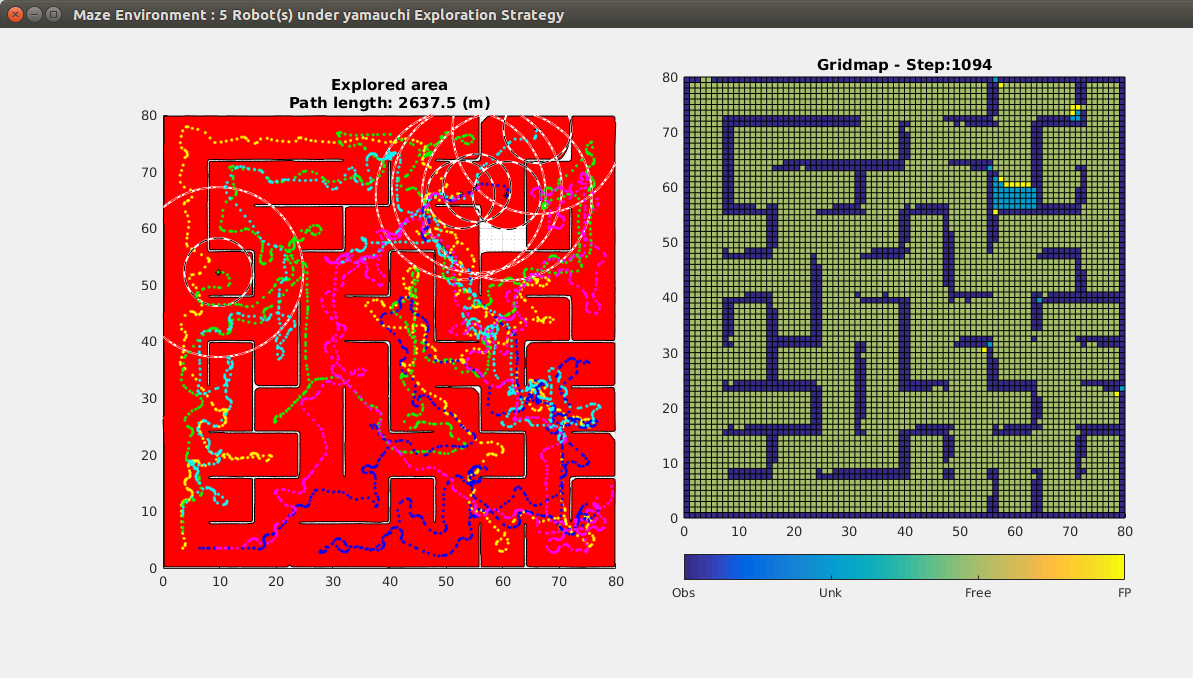
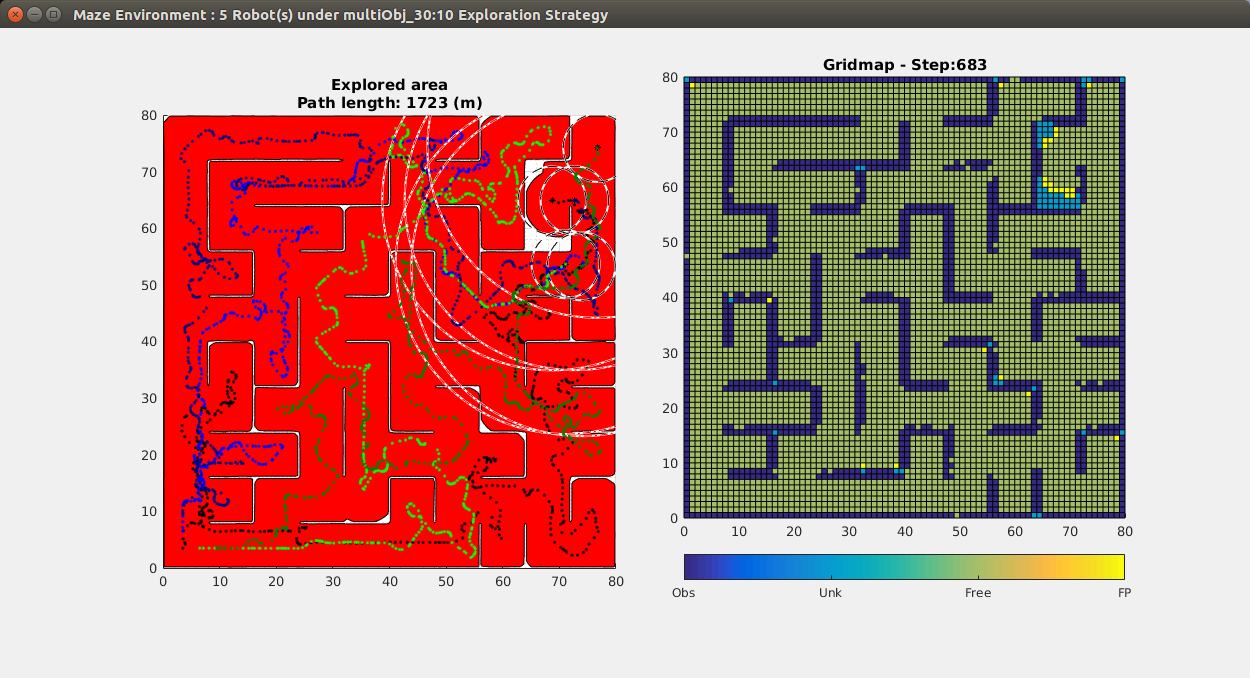
Maze (5 robots)
|
Yamauchi |
minPos |
Multi-objective |
| Ideal Communication conditions |
 |
 |
 |
| Non-Ideal Communication conditions |
 |
 |
 |