Tratamiento de Imágenes por Computadora
Detección del contacto bebé-objeto
En colaboración con CICEA
Estudiante:
Docentes:
Índice
- Descargables
- Introducción
- Objetivos
- Equipos y Materiales
- Montaje Experimental
- Código base
- Objetos
- Espacio de color de los objetos
- Máscara
- Esqueleto de las personas
- Distancia objeto - muñeca del bebé
- Ejecución, entrada y salida
- Pasaje de conjunto de imágenes a video
- Posibles mejoras
- Código
Descargables
- Proyecto_Matias_Fernandez_Lakatos.pdf
- Proyecto_Matias_Fernandez_Lakatos.py
- Range-detector.py
- vid_cam_09.mp4
- vid_cam_10.mp4
- vid_cam_11.mp4
- outvid_cam_09.mp4
- outvid_cam_10.mp4
- outvid_cam_11.mp4
- outmask_cam_09.mp4
- outmask_cam_10.mp4
- outmask_cam_11.mp4
Introducción
El número de trabajos empíricos que adoptan una perspectiva dinámica, corporizada y situada ha aumentado notoriamente en el campo del aprendizaje en los últimos años. Esto implica el estudio en conjunto de la cambiante estructura tanto del organismo, su entorno y de la relación entre ambas. Los procesos motores, sensoriales, y la estructura del ambiente son vistos no como meros accesorios o restricciones de las interacciones con el mundo, sino como constitutivas de los procesos cognitivos en sí.
Este proyecto se encuentra enmarcado en un proyecto del Centro Interdisciplinario en Cognición para la Enseñanza y el Aprendizaje (CICEA)1. En CICEA se propusieron crear un espacio que permita el estudio ecológico del comportamiento sensoriomotriz del niño a través del uso de múltiples cámaras de alta resolución temporal, micrófonos y algoritmos de visión por computadora; apostando a su vez, al trabajo y desarrollo de proyectos interdisciplinarios. Como resultado contamos con un laboratorio que permite obtener información del movimiento del cuerpo en 3D, de las expresiones faciales, y de las vocalizaciones. Más específicamente:
grabaciones audiovisuales tradicionales con buena resolución temporal,
seguimiento de un cuerpo en tres dimensiones en solitario o interactuando con otra persona,
estudio de posiciones corporales de dos personas en simultáneo,
estudios de expresiones faciales de una o dos personas interactuando.
Objetivos
En esta instancia se desea automatizar una tarea dentro del estudio de las reacciones del bebé. Se intenta obtener sin necesidad de intermediarios los instantes en los que el bebé toca al objeto, por cuánto tiempo lo hace, si lo llega a sujetar y por cuánto tiempo.
Equipos y Materiales
Espacio Físico
La obtención de los datos se realiza en el Laboratorio de Aprendizaje en Primera Infancia CICEA (LabAPI-CICEA) situado en José Enrique Rodó 1839 bis. Este laboratorio puede apreciarse en la figura [fig:laboratorio], y en la figura [fig:cam] está una vista ampliada de la cámara a utilizarse.
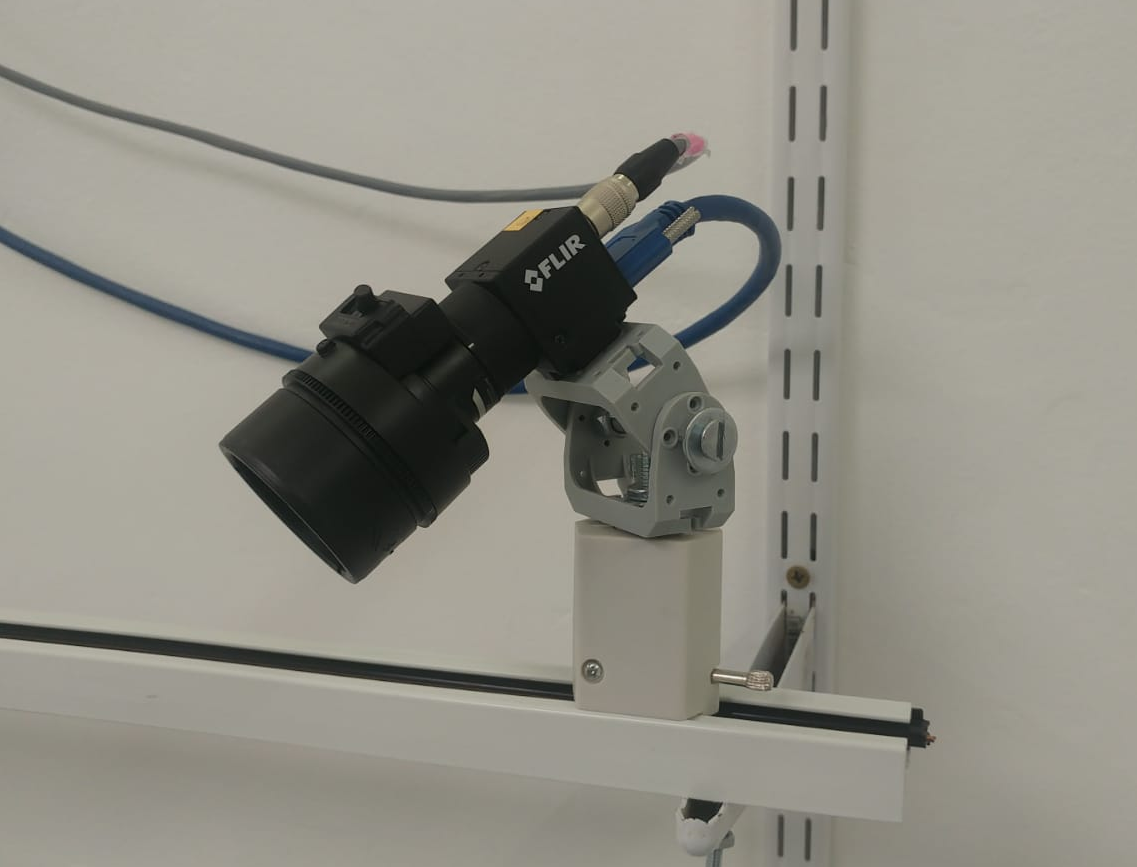
Equipo disponible para el proyecto
El laboratorio cuenta con tres cámaras Flir Blackfly S, ver figura [fig:camara]:
Resolución 1280x1024px.
Máximo frame rate 170fps (manteniendo tamaño imagen).
Sensor a color.
Conector datos y alimentación USB3.1
Conector analógico
Tamaño del buffer 240 MB
Totalmente configurables mediante el uso de la librería Spinnaker de Flir.
Cuenta con un interfaz de visualización de nombre Sinview.
La computadora que procesa los datos tiene las siguientes características:
Tarjeta de Video NVidia GTX1060
Tarjeta USB 3.1 - 4 puertos, bus independientes
32GB RAM
SSD 256GB - con SO Ubuntu 18
HDD WD Blue 1TB (Procesamiento)
HDD WD Purple 4TB (Guardado)
HDD WD Purple 4TB (Respaldo)
Montaje Experimental
No debe haber presentes objetos de color similar, si bien es capaz de distinguir entre tonalidades distintas mejor no forzar al código. El bebé deberá situarse a la derecha de la madre, considerando la visión de las cámaras. La cámara que se encuentra enfrentada a la puerta de entrada (cámara número 10) tendrá una perspectiva que tomará al bebé como debajo de la madre. Todas las cámaras se encuentran fijas y no se mueven para distintas tomas.
Código base
Para el análisis de los videos se utilizó como base el código proporcionado por Adrian Rosebrock presente en su página web2. Más específicamente el código para el Ball Tracking with OpenCV3. El mismo fue modificado para que se adaptara a nuestra situación pero utiliza la misma idea.
Objetos
Los objetos serán simplificados a un punto, el centroide. A continuación vemos cómo extraer este punto del video. Es por esto que las distancias al objeto serán medidas desde este punto.
Espacio de color de los objetos
Previo al análisis se definen los rangos de colores en el espacio de color HSV de los distintos objetos que participarán en los videos. Puede realizarse esto incluso con una imagen extraída del video a analizar. Para esto se utilizó el programa de Range-Detector.py disponible en github 4. El mismo consiste en ir variando los límites en el espacio de color HSV (permite también hacerlo en el espacio RGB) hasta quedarse sólo con el objeto. Luego, estos límites son introducidos en el algoritmo de seguimiento de objetos y serán los que definan al objeto a seguir. De esta manera podremos separarlo del resto del video. Es por esta razón que no deben aparecer elementos que se encuentren dentro del subespacio de color asociado a cualquiera de los objetos que se desean seguir. Por lo menos no deben aparecer de forma tal que ocupen un lugar mayor al objeto en cuestión.
Máscara
Una vez aplicada la primera máscara de color haremos una sucesión de funciones que erosionarán y dilatarán los espacios que hayan caído dentro del subespacio de color del objeto. Primero se erosiona para eliminar cualquier tipo de ruido pequeño que se encuentre en el video, después se dilata para que el objeto llegue a un tamaño típico del objeto.
La máscara de color del objeto debe presentar un tamaño considerable para no ser eliminado por la erosión.
Con el fin de visualizar lo que estamos realizando se despliega la máscara en otra ventana.
A partir de la máscara obtenemos el centroide que vamos a considerar como el centro del objeto. Otra razón más para no introducir elementos con un código de color similar al objeto seguido.
El centroide es desplegado como un punto rojo en el video y también se genera una figura amarilla que envuelve el objeto si sus dimensiones son mayores a un cierto tamaño. Esto último se hace con la función cv2.minAreaRect para los objetos con forma de prismas ó cv2.minEnclosingCircle 5 para aquellos que son más similares a una esfera o una dona.
A su vez, contamos con una cola de puntos rojos que siguen al centroide del objeto. Mientras haya registro del objeto la cola se irá diluyendo con el tiempo.
Esqueleto de las personas
Una vez obtenido el punto que representará la posición del objeto, el centroide, debemos encontrar aquel punto que represente la mano del bebé y así poder medir la distancia entre él y el objeto.
Utilizando el programa de OpenPose 6 podemos obtener el esqueleto de las personas. En otras palabras, tenemos puntos clave, como son las muñecas del sujeto de estudio, disponibles en todo el video como podemos ver en la figura [fig:img_muestra_OpenPose].
Podemos apreciar los puntos de la mano que también son otorgados por OpenPose, la adquisición de estos datos analizando el esqueleto de un bebé es más complicado ya que presentan una confianza menor. Por esta razón, utilizaremos los datos de sus respectivas muñecas. La visualización del algoritmo de seguimiento será de sólo los puntos de las muñecas, el objeto (su centroide) y el trazo que hace este último como podemos ver en la figura [fig:img_muestra].
Debido a que en los videos originales aparece la madre con su bebé el programa OpenPose guardará los dos esqueletos. La información de los esqueletos fue otorgada por el laboratorio y se encuentra en archivos .json. Al momento de importar esta información hay que ser precavido. El bebé estará situado a la derecha de la madre, por lo que de haber dos elementos en el .json que guarda la información de los esqueletos tomaremos aquel en el que la distancia en el eje x de la nariz sea mayor. Esto vale para las cámaras 09 y 11, para la 10, debido a la perspectiva, tomaremos la información del esqueleto que tenga una coordenada y mayor. En caso de que haya información de un sólo esqueleto no imponemos condición. Tal vez en un trabajo posterior se pueda imponer una restricción para ver si en estos casos el esqueleto es el de la madre o del bebé.
Distancia objeto - muñeca del bebé
Se estudiará cada video por separado pero siempre tomando en cuenta que son diferentes perspectivas de la misma escena. Sabemos que de las tres cámaras, dos se encuentran enfrentadas, y todas distan unos 90o de la más próxima, ver figura [fig:laboratorio]. Todas están aproximadamente a una altura entre 1.3 y 1.4 metros del piso. Los sujetos a estudiar estarán sentados por debajo de las cámaras. Esta disposición será importante debido a que si registramos un contacto bebé-objeto en al menos dos cámaras, tendremos un contacto efectivamente.
Cada vez que la distancia, μ, entre el objeto y la muñeca del bebé (izquierda y derecha) sea menor a un cierto valor fijo, η, se guardará la información de los segundos en que sucedió. Consideramos que hay contacto con el objeto si la distancia es menor a η. Tomamos como ηmax a la distancia desde la esquina superior izquierda a la inferior derecha. De esta manera, medimos todas las distancias de forma tal que ηmax = 100 y logrando que se mantengan invariante las distancias frente al reescaleo de la pantalla. Es decir,
$$\mu = 100 \times \dfrac{\sqrt{\big(\mathrm{centroide}[1]-\mathrm{muneca}[1]\big)^2 + \big(\mathrm{centroide}[0]-\mathrm{muneca}[0]\big)^2}}{\sqrt{\mathrm{length} + \mathrm{width}}}$$
El valor de la distancia límite debe de ser mejorado ya que no toma en cuenta la profundidad. De todas formas, el problema no es tan grande ya que el espacio en donde se encuentra el bebé será similar en todas las grabaciones. Una vez que la restricción en la distancia se calibra, ésta será una muestra muy buena de lo que uno considera que el bebé se encuentra en contacto con el objeto. La forma de calibrarla es ayudada al mostrar en el video la distancia entre las muñecas y el objeto siendo seguido segundo a segundo. De esta manera, podemos medir la distancia cuando el bebé toque efectivamente al objeto en los videos guardados.
Si tomáramos la información de una sola cámara podríamos encontrar falsos positivos debido a que no considera la profundidad de los elementos. Por esta razón consideraremos que hay contacto solamente cuando quede registrado para dos cámaras. Siguiendo esta línea de razonamiento, tomaremos el inicio y final del contacto para los momentos en que no haya registro para al menos dos cámaras en el frame anterior y posterior, respectivamente.
Es necesario aclarar que de no modificar el programa los intervalos de tiempo en que se considera el contacto pueden aparecer diferenciados por milésimas de segundo. Como esto no es posible se define el intervalo de tiempo intervalo_t de forma tal que si la diferencia entre el inicio del contacto siguiente y el final del contacto actual es menor a este valor, se unen los dos lapsos de tiempo. En este programa se tomó intervalo_t = 0.3.
Ejecución, entrada y salida
Ejecución y entrada
Para llamar al código se deben primero tener todos los paquetes necesarios (ver código). El código deberá estar en una carpeta en donde se encuentren:
Una carpeta conteniendo los archivos .json
Tantas carpetas como objetos a seguir con nombres siguiendo el siguiente estilo: imagenes_“color del objeto”.
Los tres videos de las cámaras con nombre vid_cam_<X> con X = 09, 10 y 11.
Luego, desde la terminal se debe escribir el siguiente código adaptado a la situación de cada uno: python <nombre del código.py> –video <link a la carpeta donde se encuentran los videos> –json <link a donde se encuentran los .json> –confianza 0.5 –escala 600 –buffer 42 –guardar si –objeto verde
Se agregaron varias opciones para modificar de la menor manera posible el código. Las opciones son las siguientes:
–video ó -v: link a donde se encuentran los videos, éstos deben tener el siguiente formato: vid_cam_<X>.mp4 con X = 09, 10 y 11.
–json ó -j: link a donde se encuentran los .json. Muy seguramente deban ser modificados en el código cómo llamarlos, en el actual código los .json tienen una estructura como la siguiente:
000000016300_rendered_182855<X>_keypoints.json, en este caso comienzan por el número 16300 y luego es rellenado de ceros hasta llegar a los doce dígitos.–confianza ó -c: es la confianza permitida para tomar los puntos tomados del código de OpenPose.
–escala ó -e: es el reescaleo que se le hace al video con el único fin de visualizar mejor los videos.
–buffer ó -b: El buffer son la cantidad de puntos guardados del centroide. Éstos sirven para ver el haz que sigue al objeto, en este código de color rojo.
–guardar ó -g: Si uno pone la opción “imgs” salva todos los frames de los videos que se despliegan; si uno pone la opción “vid” salva los videos que aparecen. Debido a que puede haber un enlentecimiento debido al procesamiento de datos consideré mejor tener las dos opciones, una para luego generar un video fidedigno con el tiempo que transcurre y otro más visual e inmediato.
–objeto ó -o: el objeto a seguir: “verde”, “amarillo” ó “rojo”.
Salida
Como se menciona en la subsección anterior, si se elije guardar los videos se guardarán con el siguiente formato: “outputcam<cámara>_e-<escala>_b-<buffer>_c-<confianza*10>_o-<objeto>.avi”.
Ejemplo: “outputcam09_e-600_b-42_c-03_o-verde.avi” . Uno por cada cámara.
También se creará un archivo .dat con la información de los contactos para cada mano. Cuándo se inició, cuándo finalizó y cuánto duró. Un ejemplo de un archivo de nombre “data_objeto_verde.dat” me dio como resultado el siguiente contenido:
# Para el objeto verde, con escala 600, buffer 42 y confianza 0.3:
Para la distancia objeto - muñeca derecha:
inicio,final,duración
7.560 8.600 1.040
10.440 10.560 0.120
14.680 16.640 1.960
17.040 20.000 2.960
Para la distancia objeto - muñeca izquierda:
inicio,final,duración
18.960 19.000 0.040
Pasaje de conjunto de imágenes a video
Al tener un conjunto de imágenes podemos generar un video utilizando el programa FFMPEG.
La línea de código para realizarlo en la terminal de linux es:
ffmpeg -framerate 60 -pattern_type glob -i 'outimg_cam<Y>_*.png' -c:v libx264 -pix_fmt yuv420p
outvid_cam_<X>.mp4con X = 09, 10 u 11 e Y = 0, 1 ó 2 correspondiente a cada cámara. La opción “framerate” corresponde a los frames por segundo de la imagen. La toma de datos en el laboratorio corresponde a 60fps.
Si previamente se instaló conda, una error común suele aparecer con el comando x264, en ese caso es necesario colocar en la terminal de linux el siguiente comando:
conda install x264=='1!152.20180717' ffmpeg=4.0.2 -c conda-forgePosibles mejoras
A lo largo del informe mencioné algunas mejoras que pueden hacerse al código actual. Aquí menciono también la posibilidad de eliminar el fondo de una manera inteligente. Una forma sería adaptar el código de Adrian Rosebrock titulado Basic motion detection and tracking with Python and OpenCV 7.
De esta manera en la pantalla se mostrarían solo los elementos que estén en movimiento, haciendo que los objetos aparezcan sólo al ser movidos, simplificando el análisis.
Debido a que no contamos con la información tridimensional de la posición de los objetos nuestras distancias serán euclideanas proyectadas sobre un plano. Una mejora sería contar con esta información, pero sin ésta este problema intenta ser solucionado con la condición de que al menos dos cámaras observen un contacto con el objeto. Observando los resultados resulta evidente que las distancias deben ser modificadas de acuerdo a la cámara que estemos observando.
Ejemplos
https://www.pyimagesearch.com/2015/09/14/ball-tracking-with-opencv/#↩
https://github.com/jrosebr1/imutils/blob/master/bin/range-detector↩
https://docs.opencv.org/3.1.0/dd/d49/tutorial_py_contour_features.html↩
https://github.com/CMU-Perceptual-Computing-Lab/openpose/blob/master/doc/output.md↩
https://www.pyimagesearch.com/2015/06/01/home-surveillance-and-motion-detection-with-the-raspberry-pi-python-and-opencv/backgroundsubtraction↩
Código
### INFORMACIÓN A TENER EN CUENTA:
# Los videos no deben poseer más de un objeto con igual color. Si bien es posible diferenciar diferentes tonalidades de un color es mejor no llevar al extremo el código.
# Una posible mejora sería combinar este trackeo de color con otro que use la textura del objeto.
# Al ser objetos sencillos no se pueden sacar muchos descriptores y por ende keypoints, por eso se trabaja con el color.
# Un perfeccionamiento para lograr obtener un mejor trackeo de los objetos sería entrenar a un algoritmo con cada objeto en diferentes posiciones y con incidencias de luz variadas, mostrándole cuál es el objeto en cada instante. Deep Learning.
#1# Los videos de las tres cámaras deben presentarse como vid_cam_09 / 10 / 11
#2# Los límites de los colores en el espacio HSV de los objetos fueron obtenidos con el archivo range-detector.py
#3# Los archivos .json tienen la siguiente estructura: '12 dígitos conteniendo el número de la imagen'+ '_rendered_18285509_keypoints' 'nada/_1/_2'.json Ejemplo: '000000000321_rendered_18285509_keypoints.json'
#4# En la terminal se deben poner el siguiente link y adaptarlo a cada sitio donde es arrancado. Abrir la terminal desde la carpeta donde se encuentra el archivo "tracker_objetos_varias_camaras_color-centroide.py":
# python Proyecto_Matias_Fernandez_Lakatos.py --video <link a la carpeta donde estan los videos> --json <link a la carpeta donde estan los archivos .json> --confianza 0.5 --escala 600 --buffer 42 --guardar imgs --objeto verde
# Las opciones para el objeto (o) son: 'rojo' 'amarillo' y 'verde'
# La confianza (c) es el valor que arroja los .json del OpenPose con respecto a una determinada predicción.
# La escala (e) es con el fin de mejorar la visualización para distintas máquinas
# El buffer (b) corresponde a cuán larga es la curva que sigue al centroide, en mi caso, de color roja.
# Opción disponible para guardar (g) o no los videos. "si": guarda.
###
# Paquetes necesarios
from collections import deque
from imutils.video import VideoStream
import numpy as np
import argparse
import cv2
import imutils
import time
import urllib.request as request
import json
# Llamar a las variables necesarias
ap = argparse.ArgumentParser()
ap.add_argument("-o","--objeto", type=str, required = True, help="objeto a trackear")
ap.add_argument("-v","--video", required = True, help="camino a la carpeta de videos")
ap.add_argument("-j","--json", required = True,help="path to the json's files")
ap.add_argument("-c","--confianza",type=float,default=0.2, help="parámetro de confianza para OpenPose")
ap.add_argument("-e","--escala", type=int, default=600, help="parámetro de re-escaleo")
ap.add_argument("-b","--buffer" , type=int, default=64 , help="max buffer size")
ap.add_argument("-g","--guardar", type=str, required = True, help="guarda video si se coloca la opción 'vid', guarda las imágenes de los frames si la opción es 'imgs'")
args = vars(ap.parse_args())
# Definimos los límites de color, en el espacio de color HSV, para cada objeto
# Lo hacemos con el archivo: "range-detector.py"
if args["objeto"]=='rojo':
colorLower = (0, 187,0) #RedLower
colorUpper = (6, 244,255) #RedUpper
elif args["objeto"]=='amarillo': #v2
colorLower = (22, 126,0) #YellowLower
colorUpper = (24,154,255) #YellowUpper
elif args["objeto"]=='verde': #v2
colorLower = (46,82,0) #VerdeLower
colorUpper = (65,142,255) #VerdeUpper
elif args["objeto"]=='azul':
colorLower = (92,39,84) #VerdeLower
colorUpper = (120,85,167) #VerdeUpper
# Puntos de la traza de centroides detectados. Uno para cada video.
pts = [ deque(maxlen=args["buffer"]), deque(maxlen=args["buffer"]), deque(maxlen=args["buffer"]) ]
# Importo los videos de las tres cámaras:
vs = [cv2.VideoCapture(args["video"]+'/vid_cam_09.mp4'), cv2.VideoCapture(args["video"]+'/vid_cam_10.mp4'), cv2.VideoCapture(args["video"]+'/vid_cam_11.mp4')]
# Descriptores de los videos (tomo cam09 como la representativa)
length = int(vs[0].get(cv2.CAP_PROP_FRAME_COUNT))
width = int(vs[0].get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(vs[0].get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = vs[0].get(cv2.CAP_PROP_FPS)
print('cantidad de frames:',length,'largo del video:',width,'ancho del video:' ,height,'fps:',fps)
# Genero los elementos que harán la escala y el video que guardaré
Factor_escala = args["escala"]
imgScale = Factor_escala/width
newX,newY = width*imgScale, height*imgScale
if args["guardar"]=='vid':
fourcc = cv2.VideoWriter_fourcc(*'MP4V') #esto sirve para que salga un video, pero más lento. Palabra clave: videoout
out = [
cv2.VideoWriter(args["video"]+'/outputcam09_e-'+repr(args["escala"])+ '_b-'+repr(args["buffer"])+ '_c-0'+repr(int(10*args["confianza"]))+ '_o-'+args["objeto"]+ '.mp4',fourcc, 20.0, (int(newX),int(newY))),
cv2.VideoWriter(args["video"]+'/outputcam10_e-'+repr(args["escala"])+ '_b-'+repr(args["buffer"])+ '_c-0'+repr(int(10*args["confianza"]))+ '_o-'+args["objeto"]+ '.mp4',fourcc, 20.0, (int(newX),int(newY))),
cv2.VideoWriter(args["video"]+'/outputcam11_e-'+repr(args["escala"])+ '_b-'+repr(args["buffer"])+ '_c-0'+repr(int(10*args["confianza"]))+ '_o-'+args["objeto"]+ '.mp4', fourcc, 20.0, (int(newX),int(newY)))] #esto sirve para que salga un video, pero más lento. Palabra clave: videoout
#iniciar conteos
tiempo_R_toca = np.zeros((length+1,3))
tiempo_L_toca = np.zeros((length+1,3))
cambia = 'si' # Utilizo esta variable a modo de switch para graficar o no los puntos de OpenPose, la prendo al grabar nueva info en niño, la pago al finalizar el loop
restriccion_distancia = 8 # Para distancias menores a ésta considero que el bebé toca el objeto.
# Loop para las tres cámaras
for j in range(3):
counter_frames = 0
while True:
# Toma el frame del video
oriframe= vs[j].read()
oriframe = oriframe[1]
# Si es el final del video, que rompa el while
if oriframe is None:
break
# Sumamos un frame más ya que continuamos en el loop
counter_frames += 1
# (resize the frame)
frame = cv2.resize(oriframe,(int(newX),int(newY)))
# Borroneamos para hacer un pasa alto en las frecuencias: blur
blurred = cv2.GaussianBlur(frame, (11, 11), 0)
# Pasamos al espacio de color HSV
hsv = cv2.cvtColor(blurred, cv2.COLOR_BGR2HSV)
# Construimos una máscara con los límites impuestos en el espacio de color
mask= cv2.inRange(hsv, colorLower, colorUpper)
# a series of dilations and erosions to remove any small
# blobs left in the mask
# Estas dos líneas son análogas a cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel).
# Mediante dilataciones y erosiones removemos las pequeñas burbujas que quedan en la máscara
# Aquí se presenta la solución al problema de los puntos falsos positivos de la máscara de color que es distinto para cada objeto.
# Es más artesanal este paso, y adaptado a cada objeto.
if args["objeto"] == 'rojo':
mask = cv2.erode(mask, None, iterations=3)
mask = cv2.dilate(mask, None, iterations=3)
elif args["objeto"] == 'amarillo' or args["objeto"] == 'verde':
mask = cv2.erode(mask, None, iterations=3)
mask = cv2.dilate(mask, None, iterations=3)
#Para visualizar lo que ve el algorítmo como máscara:
cv2.imshow("Mask", mask)
# Encuentra los contornos de la máscara
cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
# SIMPLE (guarda menos elementos, más rápida) / NONE
# Toma la versión correcta de OpenCV
cnts = imutils.grab_contours(cnts)
center = None
radius = None
rect = None
# only proceed if at least one contour was found
if len(cnts) > 0:
# Encuentra el controno más grande de la máscara y lo utiliza para encontrar la mínima figura correspondiente al objeto y su respectivo centroide. Por ejemplo, un rectángulo o un círculo
c = max(cnts, key=cv2.contourArea)
# Sabemos la figura que se adapta a cada objeto
if args["objeto"]=='rojo':
rect = cv2.minAreaRect(c)
elif args["objeto"]=='amarillo' or args["objeto"]=='verde':
((x, y), radius) = cv2.minEnclosingCircle(c)
# moments trae el centroide:
# cx = int(M['m10']/M['m00']) & cy = int(M['m01']/M['m00'])
M = cv2.moments(c)
center = (int(M["m10"] / M["m00"]), int(M["m01"] / M["m00"]))
# Dibujo el centroide de color Rojo (0,0,255) [BGR]
cv2.circle(frame, center, int(10*imgScale), (0, 0, 255), -1)
# Procede si radio mayor a un valor,
if radius is not None:
if radius > 10*imgScale:
# Dibuja un círculo amarillo (0, 255,255) centrado en el centroide
cv2.circle(frame, (int(x), int(y)), int(radius),(0, 255,255), 2)
# o altura AND ancho mayor a un valor.
if rect is not None:
if rect[1][0]>10*imgScale and rect[1][1]>10*imgScale:
box = cv2.boxPoints(rect)
box = np.int0(box)
# Dibuja un rect amarillo (0, 255,255) centrado en el centroide
cv2.drawContours(frame,[box],0,(0,255,255),2)
# Actualiza los puntos de trackeo (queue). Lo hace tal que los va colocando a la izquierda, por eso la definción de thickness más adelante.
pts[j].appendleft(center)
# Loop en los puntos de trackeo. Acá hago el haz que se va desintegrando
for i in range(1, len(pts[j])):
# Si alguno de los dos últimos en None, los ignoro
if pts[j][i - 1] is None or pts[j][i] is None:
continue
# Si no, defino el ancho de la línea que conecta los puntos de forma tal que
# cuanto más "viejos" sean los puntos más se achiquen.
thickness = 1+int(np.sqrt(args["buffer"] / float(i + 1)) * 2*imgScale)
cv2.line(frame, tuple(pts[j][i-1]),tuple(pts[j][i]), (0,0,255), thickness)
################## JASON FILES ##################
# Archivos: 000000000 número de archivo _rendered_18285509_keypoints _1 _2 .json
# Hay 12 dígitos de números, pongo el número de la imagen y lleno de ceros hasta completar los 12 dígitos
num_archivo = repr(counter_frames-1).zfill(12)
if j==0:
with open(args["json"]+'/'+num_archivo+'_rendered_18285509_keypoints.json') as f:
data = json.load(f)
elif j==1:
with open(args["json"]+'/'+num_archivo+'_rendered_18285509_keypoints_1.json') as f:
data = json.load(f)
else:
with open(args["json"]+'/'+num_archivo+'_rendered_18285509_keypoints_2.json') as f:
data = json.load(f)
# Extraigo valores del json:
persona_1 = data['people'][0]
pose_keypoints_2d_1 = persona_1["pose_keypoints_2d"]
pos_cabeza = 1 # posición en el archivo .json
xc1 = pose_keypoints_2d_1[int((pos_cabeza-1)*3)]
yc1 = pose_keypoints_2d_1[int((pos_cabeza-1)*3+1)]
# Prueba ver si hay datos de otro esqueleto y compara con el que ya está para ver si el segundo es el niño o es simplemente el primero
try:
persona_2 = data['people'][1]
pose_keypoints_2d_2 = persona_2["pose_keypoints_2d"]
xc2 = pose_keypoints_2d_2[int((pos_cabeza-1)*3)]
yc2 = pose_keypoints_2d_2[int((pos_cabeza-1)*3+1)]
# En la cámara 10, la opuesta a la puerta, el niño tiene la condición de que está a una y menor, no una x mayor.
if (xc1-xc2<0) and j != 1: # Si xc1 < xc2 -> me quedo con xc2 (niño derecha)
niño = data['people'][1]
elif (yc1-yc2<0) and j == 1: # Si yc1 < yc2 -> me quedo con yc2 (niño abajo)
niño = data['people'][1]
except:
niño = data['people'][0]
pose_keypoints_2d = niño["pose_keypoints_2d"]
hand_left = niño["hand_left_keypoints_2d"]
hand_right = niño["hand_right_keypoints_2d"]
if cambia == 'si':
# Cabeza:
xc = pose_keypoints_2d[int((pos_cabeza-1)*3)]
yc = pose_keypoints_2d[int((pos_cabeza-1)*3+1)]
cc = pose_keypoints_2d[int((pos_cabeza-1)*3+2)]
cabeza_pos = (int(xc*imgScale),int(yc*imgScale))
cv2.circle(frame, cabeza_pos, int(8*imgScale), (255,255,255), -1) #Blanco
# Pulgar de la mano derecha:
pos_pulgar_RHand = 4 # posición en el archivo .json
xpRH = hand_right[int((pos_pulgar_RHand-1)*3)]
ypRH = hand_right[int((pos_pulgar_RHand-1)*3+1)]
cpRH = hand_right[int((pos_pulgar_RHand-1)*3+2)]
# Junto con la imagen, las posiciones se ajustan a la nueva escala.
#Factor_escala = 600
#imgScale = Factor_escala/width
RHand_pulgar_pos = (int(xpRH*imgScale),int(ypRH*imgScale))
cv2.circle(frame, RHand_pulgar_pos, int(8*imgScale), (255,51,51), -1) #azul claro
# Pulgar de la mano izquierda:
pos_pulgar_LHand = 4
xpLH = hand_left[int((pos_pulgar_LHand-1)*3)]
ypLH = hand_left[int((pos_pulgar_LHand-1)*3+1)]
cpLH = hand_left[int((pos_pulgar_LHand-1)*3+2)]
LHand_pulgar_pos = (int(xpLH*imgScale),int(ypLH*imgScale))
cv2.circle(frame, LHand_pulgar_pos, int(8*imgScale), (0 ,204, 0), -1) #verde claro
# Muñeca derecha:
pos_RWrist = 5
xRW = pose_keypoints_2d[int((pos_RWrist-1)*3)]
yRW = pose_keypoints_2d[int((pos_RWrist-1)*3+1)]
cRW = pose_keypoints_2d[int((pos_RWrist-1)*3+2)]
RWrist_pos = (int(xRW*imgScale),int(yRW*imgScale))
cv2.circle(frame, RWrist_pos, int(8*imgScale), (255,255,51), -1) #celeste
# Muñeca izquierda:
pos_LWrist = 8
xLW = pose_keypoints_2d[int((pos_LWrist-1)*3)]
yLW = pose_keypoints_2d[int((pos_LWrist-1)*3+1)]
cLW = pose_keypoints_2d[int((pos_LWrist-1)*3+2)]
LWrist_pos = (int(xLW*imgScale),int(yLW*imgScale))
cv2.circle(frame, LWrist_pos, int(8*imgScale), (102,255,178), -1) #verde agua
##########################################################
# Defino la distancia de forma tal que si estan los objetos lo más alejado posible da 100.
if center is not None and center != (0,0):
if cRW > args["confianza"]:
cambia == 'si'
# Distancia objeto-muñeca derecha
dist_obj_Rwrist = 100*np.sqrt((RWrist_pos[0]-center[0])**2 + (RWrist_pos[1]-center[1])**2 )/(np.sqrt(newX**2+newY**2))
cv2.line(frame, RWrist_pos,(int(center[0]),int(center[1])), (255,0,0), int(4*imgScale)) #En azul
# Guardo los puntos potenciales al contacto bebé-objeto:
if dist_obj_Rwrist < restriccion_distancia:
tiempo_R_toca[ counter_frames][j] = counter_frames/fps
cv2.putText(frame, "TOCA", (int(newX*0.02), int(newY*0.8)),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 2)
info_R = ["Dist MD-O", dist_obj_Rwrist]
text_R = "{}: {}".format(info_R[0],info_R[1])
cv2.putText(frame, text_R, (int(newX*0.02), int(newY*0.9)),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255), 2)
if cLW > args["confianza"]:
cambia == 'si'
# Distancia objeto-muñeca izquierda
dist_obj_Lwrist = 100*np.sqrt((LWrist_pos[0]-center[0])**2 + (LWrist_pos[1]-center[1])**2 )/(np.sqrt(newX**2+newY**2))
cv2.line(frame, LWrist_pos,(int(center[0]),int(center[1])), (0,255,0), int(4*imgScale)) #En verde
if dist_obj_Lwrist < restriccion_distancia:
tiempo_L_toca[counter_frames][j] = counter_frames/fps
info_L = ["Dist MI-O", dist_obj_Lwrist]
text_L = "{}: {}".format(info_L[0],info_L[1])
cv2.putText(frame, text_L, (int(newX*0.02), int(newY*0.95)),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255), 2)
else:
cambia == 'no'
# Muestra el video y la máscara.
cv2.imshow("Frame", frame)
# Exporto el frame si la opción guardar es 'imgs'
if args["guardar"]=='imgs':
outfile = args["video"]+'/imagenes_'+args["objeto"]+'/outimg_cam'+repr(j)+'_'+ repr(counter_frames).zfill(12)+'.png'
cv2.imwrite(outfile, frame)
outmask = args["video"]+'/imagenes_'+args["objeto"]+'/outmask_cam'+repr(j)+'_'+ repr(counter_frames).zfill(12)+'.png'
cv2.imwrite(outmask, mask)
# Escribo el video de salida si se pone la opción 'vid'
if args["guardar"]=='vid':
out[j].write(frame) #esto sirve para que salga un video, pero más lento. Palabra clave: videoout
cv2.moveWindow('Frame', 0 ,0) # x horizontal(izq-der), y vertical(arr-aba)
cv2.moveWindow('Mask' , 700 ,0)
key = cv2.waitKey(1) & 0xFF
# Si la tecla 'q' es presionada, termina el loop de esta cámara
if key == ord("q"):
print('cantidad de frames hasta ahora:',counter_frames)
break
vs[2].release()
# Cierra todas las ventanas
cv2.destroyAllWindows()
# Supongo que el video no empieza con el bebé tocando un objeto
# tiempo_RL_toca es una variable auxiliar para simplificar código, el for que recorre las 'k' es para tomar tanto la muñeca derecha como la izquierda en un sólo pedazo de código.
tiempo_RL_toca= [tiempo_R_toca,tiempo_L_toca]
# contacto[0] será para la muñeca derecha, contacto[1] para la izquierda
contacto = [[],[]]
for k in range(2):
tiempo_contacto = tiempo_RL_toca[k]
for i in range(int(length)):
# Todos tendrán la misma información, el tema es ver si son diferentes a cero
# A continuación vemos si dos para al menos dos cámaras el bebé toca el objeto
a, b, c = tiempo_RL_toca[k][i-1,0], tiempo_RL_toca[k][i-1,1], tiempo_RL_toca[k][i-1,2] #pasado
#print(a,b,c)
aa, bb, cc = tiempo_RL_toca[k][i+0,0], tiempo_RL_toca[k][i+0,1], tiempo_RL_toca[k][i+0,2] #presente
aaa,bbb,ccc = tiempo_RL_toca[k][i+1,0], tiempo_RL_toca[k][i+1,1], tiempo_RL_toca[k][i+1,2] #futuro
# Si la cámara 'a' y la cámara 'b' detecta contacto, entonces...
if (aa*bb != 0):
# Si en el paso anterior no hubo contacto para UNA o NINGUNA CÁMARA entonces estamos en el inicio del contacto (un contacto no es considerado contacto)
if (sum([a==0,b==0,c==0])>=2):
inicio = aa # puede ser bb también.
# Si en el próximo ínidice termina el video, entonces
if i+1 == int(length):
# Si no detecta ningún contacto en alguna cámara, se termina ya
if (aaa+bbb+ccc == 0):
final = aa
# De lo contrario, termina el video tocando el objeto
else:
if (aaa !=0):
final = aaa
elif (bbb !=0):
final = bbb
else:
final = ccc
contacto[k].append([inicio,final,final-inicio])
break
elif (sum([aaa==0,bbb==0,ccc==0])>=2):
final = aa
contacto[k].append([inicio,final,final-inicio])
elif (aa*cc != 0):
# Si en el paso anterior no hubo contacto en NINGUNA CÁMARA entonces estamos en el inicio del contacto
if (sum([a==0,b==0,c==0])>=2):
inicio = aa # puede ser bb también.
# Si en el próximo ínidice termina el video, entonces
if i+1 == int(length):
# Si no detecta ningún contacto en alguna cámara, se termina ya
if (aaa+bbb+ccc == 0):
final = aa
# De lo contrario, termina el video tocando el objeto
else:
if (aaa !=0):
final = aaa
elif (bbb !=0):
final = bbb
else:
final = ccc
contacto[k].append([inicio,final,final-inicio])
break
elif (sum([aaa==0,bbb==0,ccc==0])>=2):
final = aa
contacto[k].append([inicio,final,final-inicio])
elif (bb*cc != 0):
# Si en el paso anterior no hubo contacto en NINGUNA CÁMARA entonces estamos en el inicio del contacto
if (sum([a==0,b==0,c==0])>=2):
inicio = bb # puede ser bb también.
# Si en el próximo ínidice termina el video, entonces
if i+1 == int(length):
# Si no detecta ningún contacto en alguna cámara, se termina ya
if (aaa+bbb+ccc == 0):
final = bb
# De lo contrario, termina el video tocando el objeto
else:
if (aaa !=0):
final = aaa
elif (bbb !=0):
final = bbb
else:
final = ccc
contacto[k].append([inicio,final,final-inicio])
break
elif (sum([aaa==0,bbb==0,ccc==0])>=2):
final = bb
contacto[k].append([inicio,final,final-inicio])
# Si el final de un contacto y el inicio del siguiente se diferencian en un 'intervalo_t' entonces uno los dos segmentos.
intervalo_t = 0.3 #segundos
contacto_mod = [ [] , [] ]
for k in range(2):
contacto[k].append([length/fps+10,length/fps+10,length/fps+10]) #Esto lo hago por un problema de programación que no encuentro. De no hacerlo no me toma los últimos puntos cuando junto los tiempos que distan menos de intervalo_t
B = np.zeros(len(contacto[k])-1)
for i in range(len(contacto[k])-1):
B[i] = contacto[k][i+1][0]-contacto[k][i][1] < intervalo_t #Relaiso la resta entre el inicio del frame i+1 con el final del frame i
i = 0
inicio = contacto[k][0][0]
final = contacto[k][0][1]
if len(contacto[k])==2:
contacto_mod[k].append([inicio,final,final-inicio]) #Si hay dos veces que toca, una será el elemento agregado:
else:
while i < len(B):
i+=1
if B[i-1]==1:
final = contacto[k][i][1] #Voy a tomar el siguiente por si es falso B
else:
contacto_mod[k].append([inicio,final,final-inicio])
inicio = contacto[k][i][0] #Voy a tomar el siguiente por si es falso B
final = contacto[k][i][1] #Voy a tomar el siguiente por si es falso B
# Imprimo los valores en la terminal
print('Para la mano derecha:')
if len(contacto_mod[0])==0:
print('No toca la mano derecha el objeto')
for i in range(len(contacto_mod[0])):
print('inicio:',contacto_mod[0][i][0], 'final:', contacto_mod[0][i][1], 'duración:', contacto_mod[0][i][2])
print('Para la mano izquierda:')
if len(contacto_mod[1])==0:
print('No toca la mano izquierda el objeto')
for i in range(len(contacto_mod[1])):
print('inicio:',contacto_mod[1][i][0], 'final:', contacto_mod[1][i][1], 'duración:', contacto_mod[1][i][2])
# Genero el archivo .dat
# Guardo los inicios, finales y duraciones
header = "Para el objeto "+args["objeto"]+", con escala " +repr(args["escala"])+", buffer "+repr(args["buffer"])+" y confianza 0."+repr(int(10*args["confianza"]))+":"
f = open('data_objeto_'+args["objeto"]+'.dat', 'wb')
np.savetxt(f, [], header=header)
# Defino los textos a colocar en el archivo
string = ["Para la distancia objeto - muñeca derecha:"]
string2 = ["Para la distancia objeto - muñeca izquierda:"]
infidu = ["inicio,final,duración"]
espacio = [" "]
np.savetxt(f,espacio,fmt="%s")
np.savetxt(f,string,fmt="%s")
np.savetxt(f,infidu,fmt="%s")
for i in range(len(contacto_mod[0])):
data = np.column_stack((contacto_mod[0][i][0], contacto_mod[0][i][1],contacto_mod[0][i][2]))
np.savetxt(f, data,delimiter=' ',fmt='%1.3f')
np.savetxt(f,espacio,fmt="%s")
np.savetxt(f,string2,fmt="%s")
np.savetxt(f,infidu,fmt="%s")
for i in range(len(contacto_mod[1])):
data = np.column_stack((contacto_mod[1][i][0], contacto_mod[1][i][1],contacto_mod[1][i][2]))
np.savetxt(f, data,delimiter=' ',fmt='%1.3f')
f.close()