Diferencia entre revisiones de «Grupo HotPlug»
(→Monitoreo desde el compilador) |
|||
| (No se muestran 117 ediciones intermedias del mismo usuario) | |||
| Línea 1: | Línea 1: | ||
| − | '''Introducción:''' | + | <big><big>'''Introducción:'''</big></big> |
| − | + | ||
El proyecto Butiá trata de ampliar las capacidades sensoriales y de actuación de la computadora XO del proyecto OLPC en una plataforma robótica móvil, simple y económica que permita a alumnos de instituciones educativas , en coordinación con docentes e inspectores de Enseñanza Secundaria, interiorizarse con la programación del comportamiento de robots. | El proyecto Butiá trata de ampliar las capacidades sensoriales y de actuación de la computadora XO del proyecto OLPC en una plataforma robótica móvil, simple y económica que permita a alumnos de instituciones educativas , en coordinación con docentes e inspectores de Enseñanza Secundaria, interiorizarse con la programación del comportamiento de robots. | ||
| − | Se utiliza una Placa entrada/salida (Figura | + | Se utiliza una Placa entrada/salida (Figura 8) donde se conecta un Shield (Figura |
2) con 9 conectores de 9 pines genéricos para motores, sensores y actuadores para la interactividad con el ambiente que pueden controlarse fácilmente desde cualquier lenguaje de programación con soporte de conexiones TCP/IP. | 2) con 9 conectores de 9 pines genéricos para motores, sensores y actuadores para la interactividad con el ambiente que pueden controlarse fácilmente desde cualquier lenguaje de programación con soporte de conexiones TCP/IP. | ||
Estos dispositivos se conectan a la placa entrada/salida a través del Shield. Al encender el la Placa entrada/salida, ésta revisa cada conector para ver si algo está conectado. | Estos dispositivos se conectan a la placa entrada/salida a través del Shield. Al encender el la Placa entrada/salida, ésta revisa cada conector para ver si algo está conectado. | ||
| − | Cada sensor y actuador tiene uno o más puentes en sus conectores (Figura 1) que respetan los valores de una tabla | + | Cada sensor y actuador tiene uno o más puentes en sus conectores (Figura 1) que respetan los valores de una tabla <ref>PAra ver más información consultar en http://www.fing.edu.uy/inco/proyectos/butia/</ref> uniéndo a partir de 2 pines, uno tierra y otro positivo, otros pines, para que la placa entrada/salida identifique lo que se conectó e informe a la computadora que hay conectado en cada conector a travéz de su conexión por el puerto USB. |
| + | |||
| − | A cada sensor y actuador le corresponde un valor (un número entero) entre los que podemos encontrar: | + | A cada sensor y actuador le corresponde un valor (un número entero) el cual lo identifica ante el cliente (tortugarte por ejemplo) entre los que podemos encontrar: |
[[Archivo:IMG_3872.JPG|250px|Figura 1: Sensores y boton, en el conector se pueden observar los puentes de pin a pin|thumb|dcha]] | [[Archivo:IMG_3872.JPG|250px|Figura 1: Sensores y boton, en el conector se pueden observar los puentes de pin a pin|thumb|dcha]] | ||
| Línea 40: | Línea 40: | ||
|Desconocido||info2|15 | |Desconocido||info2|15 | ||
|} | |} | ||
| − | Estos valores se pueden encontrar en el firmware con el que trabaja la Placa. Un firmware especial para el funcionamiento de este robot desarrollado en la Facultad de Ingeniería de la Universidad de la República que se puede descargar y modificar. | + | Estos valores se pueden encontrar en el firmware con el que trabaja la Placa. Un firmware especial para el funcionamiento de este robot desarrollado en la Facultad de Ingeniería de la Universidad de la República que se puede descargar y modificar<ref>Para descargar el firmware: http://www.fing.edu.uy/inco/proyectos/butia/</ref> |
Nuestro trabajo se concentra en mayor parte a este nivel. | Nuestro trabajo se concentra en mayor parte a este nivel. | ||
| + | [[Archivo:Febrero 177.JPG|thumb|Fig.6: Dispositivos colocados|dcha]] | ||
<gallery> | <gallery> | ||
| − | Archivo:IMG_3876.JPG|Shield | + | Archivo:IMG_3876.JPG|Fig.2: Shield |
| − | Archivo:IMG_3879.JPG|Shield | + | Archivo:IMG_3879.JPG|Fig.3: Shield |
| − | | | + | Archivo:Image_(1).png|Fig.4: Arduino Mega + Shield |
| + | Archivo:Image.png|Fig.5: Arduino Mega + Shield | ||
</gallery> | </gallery> | ||
| − | |||
| + | |||
| + | =='''El Proyecto:'''== | ||
| + | [[Archivo:Febrero 174.JPG|thumb|Fig.7: Robot sin XO armado |dcha]] | ||
===Integrantes:=== | ===Integrantes:=== | ||
* Juan La Cruz | * Juan La Cruz | ||
| Línea 71: | Línea 75: | ||
===Objetivos:=== | ===Objetivos:=== | ||
| + | |||
Que la actualización de los módulos de usuario y drivers del Butiá sea "on the fly" es decir, dinámico. | Que la actualización de los módulos de usuario y drivers del Butiá sea "on the fly" es decir, dinámico. | ||
Se desea que durante la ejecución del Bobot-Server, podamos conectar y tener disponible para su uso sensores o actuadores. | Se desea que durante la ejecución del Bobot-Server, podamos conectar y tener disponible para su uso sensores o actuadores. | ||
| Línea 76: | Línea 81: | ||
=='''Desarrollo del problema:'''== | =='''Desarrollo del problema:'''== | ||
| + | [[Archivo:IMG_3887.JPG|dcha|thumb|Fig.8: Placa entrada/salida (I/O, e/s) Arduino Mega]] | ||
===El Firmware=== | ===El Firmware=== | ||
| − | |||
| − | |||
| − | |||
Algunas de las placas entrada/salida (E/S, I/O, in/out) utilizadas son: | Algunas de las placas entrada/salida (E/S, I/O, in/out) utilizadas son: | ||
| − | + | *USB4all '''(enlazar)''' | |
| − | + | *Arduino Mega 03 '''(enlazar)''' | |
| − | |||
| + | El firmware consta de 11 archivos; "PnP", "ax12.h", "ax12.cpp", "comunicacion", "conector.cpp", "conector.h", "info", "modulos", "perifericos", "servicios" y el principal "butia_mega_firmware_0_2" donde se levantan los otros 10 '''(describir brevemente cada archivo)'''. El lenguaje utilizado es similar al C++. Para este trabajo modificamos los archivos "butia_mega_firmware_0_2", "modulos" y "PnP". | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | En primer lugar modificamos el código del módulo butia, incluido en el archivo modulos.pde, para incluir una nueva operación que actualice los dispositivos conectados al Butiá. Esta nueva operacion consta de un for, donde se recorren los conectores, revisando su estado. Anexamos el código añadido | |
| − | |||
| − | + | <big><source lang="c"> | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | <source lang="c"> | + | |
for (k=0; k<NUM_CONNECTORS; k++) | for (k=0; k<NUM_CONNECTORS; k++) | ||
{ | { | ||
| Línea 133: | Línea 106: | ||
} | } | ||
</source> | </source> | ||
| + | </big> | ||
| + | |||
* Al anexar esta nueva operación, debemos modificar también los drivers, incluidos en la carpeta bobot. Cambiamos, en particular, el archivo butia.lua, para poder invocar a la nueva función, que llamamos get_hot_plug. Incluimos el código: | * Al anexar esta nueva operación, debemos modificar también los drivers, incluidos en la carpeta bobot. Cambiamos, en particular, el archivo butia.lua, para poder invocar a la nueva función, que llamamos get_hot_plug. Incluimos el código: | ||
| − | + | <big> | |
<source lang="lua"> | <source lang="lua"> | ||
api.hot_plug = {} | api.hot_plug = {} | ||
| Línea 145: | Línea 120: | ||
end | end | ||
| − | </source> | + | </source></big> |
| + | |||
| + | |||
*Luego de realizar varias pruebas (detalladas en la próxima sesión) decidimos cambiar el enfoque y optamos por quitar el FOR agregado inicialmente en el módulo butiá. Lo sustituimos por el siguiente código incluido en el archivo butia_firmware_mega_0_2.pde: | *Luego de realizar varias pruebas (detalladas en la próxima sesión) decidimos cambiar el enfoque y optamos por quitar el FOR agregado inicialmente en el módulo butiá. Lo sustituimos por el siguiente código incluido en el archivo butia_firmware_mega_0_2.pde: | ||
| + | <big> | ||
<source lang="c"> | <source lang="c"> | ||
if (time_act-time_last2 >= 5000) { // cada 20ms llamamos a la sample(). Ojo porque esto afecta al "cuentapasos" | if (time_act-time_last2 >= 5000) { // cada 20ms llamamos a la sample(). Ojo porque esto afecta al "cuentapasos" | ||
| Línea 179: | Línea 157: | ||
time_last2 = time_act; | time_last2 = time_act; | ||
} | } | ||
| − | </source> | + | </source></big> |
| + | |||
| + | |||
Este código realiza las siguientes acciones: | Este código realiza las siguientes acciones: | ||
| − | + | -Recorremos los conectores, y guardamos su tipo y sub-tipo anteriores. | |
| − | + | -Si no había un conector en la lista de handlers y además, los tipos y sub-tipos son distintos, agregamos el conector llamando a '''add_module(f);''' de PnP.pde | |
| + | |||
| + | -Sino, debemos borrar del handler el módulo que acabamos de desconectar. Debemos implementar esta función, a la que llamaremos '''remove_module.''' | ||
| − | |||
| − | |||
* Para implementar remove_module, exploramos el handler, buscando el módulo a borrar y lo sustituimos por el módulo que se encuentra en la última posición ocupada del handler. Actualizamos, también, la cantidad de módulos. Incluimos la primera versión de nuestro código: | * Para implementar remove_module, exploramos el handler, buscando el módulo a borrar y lo sustituimos por el módulo que se encuentra en la última posición ocupada del handler. Actualizamos, también, la cantidad de módulos. Incluimos la primera versión de nuestro código: | ||
| + | |||
| + | <big> | ||
<source lang="c"> | <source lang="c"> | ||
void remove_module (byte num_conector) { | void remove_module (byte num_conector) { | ||
| Línea 208: | Línea 190: | ||
} | } | ||
| − | </source> | + | </source></big> |
| − | + | =='''Comenzando las pruebas:'''== | |
| − | + | ||
| − | + | ==='''Bobot-Server, monitoreo desde la terminal de Linux'''=== | |
| − | + | Brinda una interfaz de alto nivel para poder interactuar con los módulos (sensores/actuadores). | |
| + | Se interactua directamente con la placa e/s mediante una Terminal Telnet con el protocolo de transmición TCP/IP por el puerto 2009. | ||
| − | + | Algunos comandos que se pueden utilizar son: | |
| − | + | *LIST | |
| + | Lista los módulos detectados. | ||
| + | *INIT | ||
| + | '''(Falta la descripción)''' | ||
| + | *DESCRIBE moduleName | ||
| + | Devuelve una descripción del módulo. | ||
| + | *CALL moduleName operation param1, param2, ... , paramN | ||
| + | Invoca la función indicada en el módulo dado. Los parámetros dependen de la función. | ||
| + | *CLOSEALL | ||
| + | Cierra todos los módulos. | ||
| + | *OPEN moduleName | ||
| + | Abre el módulo. | ||
| − | + | [[Archivo:Probando.jpg|centro|500px]] | |
| − | + | En primer instancia, probamos nuestra implementación conectando un boton y un sensor de distancia. Hacemos un LIST y los reconoce bien. Los desconectamos, llamamos a nuestra operación y al INIT. Sin embargo, al usar el comando LIST, los sensores y el botón siguen apareciendo, lo cual nos hace pensar que la placa no fue reseteada | |
| − | + | Probando y consultando con docentes, nos dimos cuenta de que faltaba actualizar el tipo de los conectores, antes de hacer la recorrida en el for. Para ello, usamos una función implementada en conector.cpp, llamada ''' update_config ()'''. | |
| + | Incluimos el código de dicha función: | ||
| − | |||
| − | + | [[Archivo:probando2.png|Figura 10: Control del robot mediante un explorador web|thumb|borde|dcha]] | |
| − | + | [[Archivo:probando3.jpg|Figura 11: Placa Arduino + Shield|thumb|dcha]] | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | [[Archivo: | + | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| + | [[Archivo:Febrero 179.JPG|thumb|Fig.12: Robot con XO armado |dcha]] | ||
| + | <big> | ||
<source lang="c"> | <source lang="c"> | ||
void Conector::update_config () { | void Conector::update_config () { | ||
| Línea 339: | Línea 288: | ||
} | } | ||
} | } | ||
| − | </source> | + | </source></big> |
| + | ===Monitoreo desde el compilador=== | ||
| + | El compilador de la placa Arduino dispone también de un monitor para ver y controlar lo que pasa en la placa e/s, indicando desde el código lo que tiene que imprimir el firmware durante su ejecución. Se puede ver más información sobre este paso en http://arduino.cc/en/Reference/HomePage | ||
| + | [[Archivo:Cuadro Serial Monitor.png|750px|centro]] | ||
| − | + | En este caso lo utilizamos, como se puede ver en la imagen para controlar que es lo que detecta la placa en cada recorrida de los conectores, indicando en tipo y subtipo el número que representa al dispositivo que se conectó. Esta recorrida la hace cada cierto tiempo y eso se va actualizando en el monitor del compilador. | |
| + | Como se puede ver en la imagen, en el conector 0, se detecta un dispositivo al que le corresponde el número 10, que como se puede ver en la tabla le corresponde el sensor de distancia. Hasta ahora pudimos comprobar que se detectó correctamente el sensor.Si se desconecta dicho sensor, en la próxima recorrida, deberá indicar 0, lo que nos dice que la placa no detectó nada. | ||
| − | + | Primero debuggeamos usando ./lua bobot-server.lua DEBUG en la Terminal para ver más información los sensores y actuadores aparecían como unknown. | |
| + | Probando con el monitor del compilador el FOR original de tal forma que repita cada 5 seg sin el INIT que aparece antes del codigo. Se puede ver el Print indicado mostrando correctamente la lista de dispositivos conectados. Para ello agregamos en butia.lua, linea 35: Print ("tipo leido",devolver); (devolver integer) | ||
| + | [[Archivo:probando4.png|thumb|borde|dcha|Figura 14: Código anterior]] | ||
| − | |||
| − | + | <big> <source lang="c"> | |
Serial.print("conector "); | Serial.print("conector "); | ||
Serial.print(f,DEC); | Serial.print(f,DEC); | ||
| Línea 357: | Línea 311: | ||
Serial.print(" subtipo= "); | Serial.print(" subtipo= "); | ||
Serial.println(conector[f].get_subtype(), DEC); | Serial.println(conector[f].get_subtype(), DEC); | ||
| − | </source> | + | </source></big> |
| + | |||
| + | |||
| + | En base a estas pruebas decidimos eliminar el FOR original del modulo butiá | ||
| + | |||
| + | Luego haciendo para cada conector update_config: "conector[f].update_config (); funionó, se probó con un boton y un sensor y verificó que el codigo los reconocía correctamente desde el monitor del compilador. Pero probando con: ./lua bobot-server.lua DEBUG (Terminal) no funcionó, ahora el sensor de grises no aparece como unknown, sino como "grises", pero al desconectar y volver a conectar el anterior no se borra y aparece repetidas veces. | ||
| + | |||
| + | ===Luego de las primeras pruebas=== | ||
| + | |||
| + | Probando con el bobot-server, comprobamos que se detecta correctamente cuando se conecta/desconecta un sensor. Sin embargo, cuando conectamos/desconectamos sensores del mismo tipo, los nombres asignados no se actualizan. Es decir, si conectamos dos sensores del tipo X y listamos los sensores conectados (usando LIST), veremos conectados: X, X1. Al desconectar en este caso X1, veremos un comportamiento correcto. Pero, al conectar nuevamente el sensor, y listar apreciaremos: X, X2 La instancia debería ser 1 y no 2. | ||
| + | Para solucionar este problema, relacionado con la cantidad de instancias de cada conector del handler, optamos por: | ||
| + | |||
| + | |||
| + | |||
| + | 1) Crear una nueva estructura (un array de bytes), llamada instancias, en la cual guardaremos las instancias de cada conector, mapeandolos según los siguientes criterios: | ||
| + | <big> | ||
| + | <source lang="c">byte globaltype = 12*conector[num_conector].get_type() + conector[num_conector].get_subtype();</source> | ||
| + | </big> | ||
| + | |||
| + | En cada lugar del array, correspondiente a alguno de estos valores, guardaremos la cantidad de instancias de ese sensor. | ||
| + | |||
| + | {| class="wikitable" style="width:250px; height:210px" border="2" | ||
| + | |- | ||
| + | | SENSOR_DISTANCIA || 10 | ||
| + | |- | ||
| + | | SENSOR_TEMPERATURA|| 11 | ||
| + | |- | ||
| + | | SENSOR_LUZ || 12 | ||
| + | |- | ||
| + | | SENSOR_GRISES || 13 | ||
| + | |- | ||
| + | | SENSOR_BOTON || 30 | ||
| + | |- | ||
| + | | SENSOR_CONTACTO || 31 | ||
| + | |- | ||
| + | | SENSOR_TILT || 32 | ||
| + | |- | ||
| + | | SENSOR_VIBRACION || 33 | ||
| + | |- | ||
| + | | SENSOR_MAGNETICO || 34 | ||
| + | |- | ||
| + | | ACTUADOR_LED || 53 | ||
| + | |- | ||
| + | | MAX_CALLBACKS || 10 | ||
| + | |- | ||
| + | | SENSOR_POTE || 21 | ||
| + | |- | ||
| + | | UNKNOWN || 15 | ||
| + | |} | ||
| + | |||
| + | El objetivo primordial de esta estructura es tener en una variable global el numero de instancias, para poder actualizarlo en el procedimiento remove_module, ya que antes estas variables solo se podían modificar en get_config al agregar un nuevo sensor. | ||
| + | |||
| + | |||
| + | |||
| + | 2) Modificamos la estructura H, agregándole un nuevo campo, instancia, que guardará a qué instancia de ese sensor corresponde el dispositivo ubicado en ese lugar del handler. | ||
| + | De esta forma podremos acceder al valor de instacias totales para cada tipo de conector (buscando en el array instancias) y a su vez, al valor particular de cada sensor (que corresponde con la nomenclatura de su nombre). Es importante destacar, que cuando existe sólo un sensor conectado, en el array instancias habrá un 1, mientras que el valor de instancia en el handler será 0. | ||
| + | |||
| + | |||
| + | |||
| + | 3)Una vez hecho esto, tenemos que actualizar distintas partes del código, para incluir las nuevas estructuras. En particular, hicimos cambios relevantes en los procedimientos get_config, add_module y remove_module. | ||
| + | |||
| + | |||
| − | |||
| − | |||
*Luego de agregar las nuevas estructuras, volvimos a repetir las pruebas y sin embargo, el problema no se solucionó. | *Luego de agregar las nuevas estructuras, volvimos a repetir las pruebas y sin embargo, el problema no se solucionó. | ||
| Línea 390: | Línea 403: | ||
| − | + | ='''Referencias:'''= | |
| + | |||
| + | {{listaref}} | ||
| + | |||
[http://linux-hotplug.sourceforge.net HotPlug sorceforge] | [http://linux-hotplug.sourceforge.net HotPlug sorceforge] | ||
Revisión actual del 11:38 29 feb 2012
Introducción:
El proyecto Butiá trata de ampliar las capacidades sensoriales y de actuación de la computadora XO del proyecto OLPC en una plataforma robótica móvil, simple y económica que permita a alumnos de instituciones educativas , en coordinación con docentes e inspectores de Enseñanza Secundaria, interiorizarse con la programación del comportamiento de robots. Se utiliza una Placa entrada/salida (Figura 8) donde se conecta un Shield (Figura 2) con 9 conectores de 9 pines genéricos para motores, sensores y actuadores para la interactividad con el ambiente que pueden controlarse fácilmente desde cualquier lenguaje de programación con soporte de conexiones TCP/IP.
Estos dispositivos se conectan a la placa entrada/salida a través del Shield. Al encender el la Placa entrada/salida, ésta revisa cada conector para ver si algo está conectado. Cada sensor y actuador tiene uno o más puentes en sus conectores (Figura 1) que respetan los valores de una tabla <ref>PAra ver más información consultar en http://www.fing.edu.uy/inco/proyectos/butia/</ref> uniéndo a partir de 2 pines, uno tierra y otro positivo, otros pines, para que la placa entrada/salida identifique lo que se conectó e informe a la computadora que hay conectado en cada conector a travéz de su conexión por el puerto USB.
A cada sensor y actuador le corresponde un valor (un número entero) el cual lo identifica ante el cliente (tortugarte por ejemplo) entre los que podemos encontrar:

| Sensor de distancia | 10 |
| Sensor de temperatura | 11 |
| Sensor de luz | 12 |
| Sensor de grises | 13 |
| Sensor botón | 30 |
| Sensor contacto | 31 |
| Sensor Tilt | 32 |
| Sensor de vibración | 33 |
| Sensor magnético | 34 |
| Actuador Led | 53 |
| Parlante | 10 |
| Sensor potenciómetro | 21 |
| Desconocido | 15 |
Estos valores se pueden encontrar en el firmware con el que trabaja la Placa. Un firmware especial para el funcionamiento de este robot desarrollado en la Facultad de Ingeniería de la Universidad de la República que se puede descargar y modificar<ref>Para descargar el firmware: http://www.fing.edu.uy/inco/proyectos/butia/</ref> Nuestro trabajo se concentra en mayor parte a este nivel.


Fig.2: Shield

Fig.3: Shield
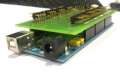
Fig.4: Arduino Mega + Shield

Fig.5: Arduino Mega + Shield


.png)

Contenido
El Proyecto:

Integrantes:
- Juan La Cruz
- Sofía Maiolo
- Mathias Battistella
Tema elegido:
Firmware + Software : soporte HotPlug.
Motivación:
Hasta el momento para que el robot funcione correctamente con todos los sensores y actuadores que se conecten, éstos deben estar conectados antes de el encendido para que cuando la Placa entrada/salida revise los conectores, los encuentre. La idea es que esto suceda también durante la ejecución del programa para mantener actualizada la lista de dispositivos conectados. Esto traería grandes ventajas entre las que podemos considerar:
- Evitar reiniciar el robot cada vez que se conectan más dispositivos, lo que permitiría ahorrar tiempo y obtener un mayor dinamismo.
- Un uso más sencillo de los dispositivos del Butiá.
- En cuanto al trabajo, nos interesó la idea de trabajar en varios niveles (firmware, bobot, tortugarte) y poder comprender mejor como se relacionan.
Objetivos:
Que la actualización de los módulos de usuario y drivers del Butiá sea "on the fly" es decir, dinámico. Se desea que durante la ejecución del Bobot-Server, podamos conectar y tener disponible para su uso sensores o actuadores.
Desarrollo del problema:

El Firmware
Algunas de las placas entrada/salida (E/S, I/O, in/out) utilizadas son:
- USB4all (enlazar)
- Arduino Mega 03 (enlazar)
El firmware consta de 11 archivos; "PnP", "ax12.h", "ax12.cpp", "comunicacion", "conector.cpp", "conector.h", "info", "modulos", "perifericos", "servicios" y el principal "butia_mega_firmware_0_2" donde se levantan los otros 10 (describir brevemente cada archivo). El lenguaje utilizado es similar al C++. Para este trabajo modificamos los archivos "butia_mega_firmware_0_2", "modulos" y "PnP".
En primer lugar modificamos el código del módulo butia, incluido en el archivo modulos.pde, para incluir una nueva operación que actualice los dispositivos conectados al Butiá. Esta nueva operacion consta de un for, donde se recorren los conectores, revisando su estado. Anexamos el código añadido
for (k=0; k<NUM_CONNECTORS; k++)
{
if (conector[k].get_type() != 0)
{add_module(k) };
}
- Al anexar esta nueva operación, debemos modificar también los drivers, incluidos en la carpeta bobot. Cambiamos, en particular, el archivo butia.lua, para poder invocar a la nueva función, que llamamos get_hot_plug. Incluimos el código:
api.hot_plug = {}
api.hot_plug.parameters = {} -- no se envian parámetros
api.hot_plug.returns = {} --nos devuelve el estado de los conectores
api.hot_plug.call = function ()
device:send(HOT_PLUG) --envío el código de operación
end
- Luego de realizar varias pruebas (detalladas en la próxima sesión) decidimos cambiar el enfoque y optamos por quitar el FOR agregado inicialmente en el módulo butiá. Lo sustituimos por el siguiente código incluido en el archivo butia_firmware_mega_0_2.pde:
if (time_act-time_last2 >= 5000) { // cada 20ms llamamos a la sample(). Ojo porque esto afecta al "cuentapasos"
// explora los conectores
for (byte f=0; f<NUM_CONNECTORS; f++) {
byte tipoOld = conector[f].get_type();
byte subtipoOld = conector[f].get_subtype();
conector[f].update_config ();
// conecte algo donde no habia nada, o cambie lo que estaba conectado
if (conector[f].get_type() != 0 &&
(conector[f].get_type() != tipoOld || conector[f].get_subtype() != subtipoOld))
{
//primero borrar el viejo en la lista de handlers si es que
//el viejo no era el tipo 0 (el caso q no hay nada)
add_module(f);
}else if (conector[f].get_type() == 0 && //desconecte algo
(conector[f].get_type() != tipoOld || conector[f].get_subtype() != subtipoOld))){
//borrar el modulo que se acaba de desconectar
} // si hay algo en el conector, agrega 1 módulo PnP para él
}
time_last2 = time_act;
}
Este código realiza las siguientes acciones:
-Recorremos los conectores, y guardamos su tipo y sub-tipo anteriores.
-Si no había un conector en la lista de handlers y además, los tipos y sub-tipos son distintos, agregamos el conector llamando a add_module(f); de PnP.pde
-Sino, debemos borrar del handler el módulo que acabamos de desconectar. Debemos implementar esta función, a la que llamaremos remove_module.
- Para implementar remove_module, exploramos el handler, buscando el módulo a borrar y lo sustituimos por el módulo que se encuentra en la última posición ocupada del handler. Actualizamos, también, la cantidad de módulos. Incluimos la primera versión de nuestro código:
void remove_module (byte num_conector) {
int i=8; //Comenzamos a recorrer desde el 8 ya que desde el 8 se comienzan a agregar los nuevos conectores.
while ( (i< num_modules) && (handler[i].num_conector != num_conector) ) //Buscamos el conector con "num_conector" en el arreglo.
i++;
if (i< num_modules) //El conector con "num_conector" no es el ultimo.
{
//Hacemos el intercambio, dejando en la posicion i, al conector que se encontraba en la ultima posicion (num_modules).
strcpy (handler[i].nombre, handler[num_modules].nombre);
handler[i].funcion = handler[num_modules].funcion;
handler[i].num_conector = handler[num_modules].num_conector;
}
num_modules--;
}Comenzando las pruebas:
Bobot-Server, monitoreo desde la terminal de Linux
Brinda una interfaz de alto nivel para poder interactuar con los módulos (sensores/actuadores). Se interactua directamente con la placa e/s mediante una Terminal Telnet con el protocolo de transmición TCP/IP por el puerto 2009.
Algunos comandos que se pueden utilizar son:
- LIST
Lista los módulos detectados.
- INIT
(Falta la descripción)
- DESCRIBE moduleName
Devuelve una descripción del módulo.
- CALL moduleName operation param1, param2, ... , paramN
Invoca la función indicada en el módulo dado. Los parámetros dependen de la función.
- CLOSEALL
Cierra todos los módulos.
- OPEN moduleName
Abre el módulo.

En primer instancia, probamos nuestra implementación conectando un boton y un sensor de distancia. Hacemos un LIST y los reconoce bien. Los desconectamos, llamamos a nuestra operación y al INIT. Sin embargo, al usar el comando LIST, los sensores y el botón siguen apareciendo, lo cual nos hace pensar que la placa no fue reseteada
Probando y consultando con docentes, nos dimos cuenta de que faltaba actualizar el tipo de los conectores, antes de hacer la recorrida en el for. Para ello, usamos una función implementada en conector.cpp, llamada update_config (). Incluimos el código de dicha función:



void Conector::update_config () {
byte id = digitalRead (pin_id0) + 2*digitalRead (pin_id1);
switch (id) {
case 3: // NADA
pinMode (pin_dig0, INPUT);
pinMode (pin_dig1, INPUT);
type = 0;
subtype = 0;
break;
case 2: // sensor analógico
pinMode (pin_dig0, INPUT);
pinMode (pin_dig1, INPUT);
digitalWrite (pin_dig0, HIGH); // activa los pull-ups
digitalWrite (pin_dig1, HIGH); // activa los pull-ups
type = 1;
subtype = digitalRead (pin_dig0) + 2*digitalRead (pin_dig1);
break;
case 1: // sensor analógico c/pin de control
pinMode (pin_dig0, OUTPUT);
pinMode (pin_dig1, INPUT);
digitalWrite (pin_dig1, HIGH); // activa los pull-ups
type = 2;
subtype = digitalRead (pin_dig1);
break;
case 0: // sensor o actuador digital
{
int analog_id = analogRead (pin_analog);
byte i;
for (i=0; i<NUM_VALORES; i++) {
if (abs(analog_id-values[i]) <= TOLERANCIA) {break;}
}
switch (i) {
case 0: case 1: case 2: case 3: case 4:
pinMode (pin_dig0, INPUT);
pinMode (pin_dig1, INPUT);
type = 3; // sensor digital
subtype = i;
break;
case 5: case 6: case 7: case 8:
pinMode (pin_dig0, OUTPUT);
pinMode (pin_dig1, INPUT);
type = 4;
subtype = i-5;
break;
case 9: case 10: case 11: case 12:
pinMode (pin_dig0, OUTPUT);
pinMode (pin_dig1, OUTPUT);
type = 5; // sensor digital c/pin de control
subtype = i-9;
break;
case NUM_VALORES: // si la red de resistencias no coincide con ningun valor, se deja en modo manual
pinMode (pin_dig0, INPUT);
pinMode (pin_dig1, INPUT);
type = 0;
subtype = 0;
break;
}
}
}Monitoreo desde el compilador
El compilador de la placa Arduino dispone también de un monitor para ver y controlar lo que pasa en la placa e/s, indicando desde el código lo que tiene que imprimir el firmware durante su ejecución. Se puede ver más información sobre este paso en http://arduino.cc/en/Reference/HomePage

En este caso lo utilizamos, como se puede ver en la imagen para controlar que es lo que detecta la placa en cada recorrida de los conectores, indicando en tipo y subtipo el número que representa al dispositivo que se conectó. Esta recorrida la hace cada cierto tiempo y eso se va actualizando en el monitor del compilador. Como se puede ver en la imagen, en el conector 0, se detecta un dispositivo al que le corresponde el número 10, que como se puede ver en la tabla le corresponde el sensor de distancia. Hasta ahora pudimos comprobar que se detectó correctamente el sensor.Si se desconecta dicho sensor, en la próxima recorrida, deberá indicar 0, lo que nos dice que la placa no detectó nada.
Primero debuggeamos usando ./lua bobot-server.lua DEBUG en la Terminal para ver más información los sensores y actuadores aparecían como unknown. Probando con el monitor del compilador el FOR original de tal forma que repita cada 5 seg sin el INIT que aparece antes del codigo. Se puede ver el Print indicado mostrando correctamente la lista de dispositivos conectados. Para ello agregamos en butia.lua, linea 35: Print ("tipo leido",devolver); (devolver integer)

Serial.print("conector ");
Serial.print(f,DEC);
Serial.print(" tipo= ");
Serial.print(conector[f].get_type(), DEC);
Serial.print(" subtipo= ");
Serial.println(conector[f].get_subtype(), DEC);
En base a estas pruebas decidimos eliminar el FOR original del modulo butiá
Luego haciendo para cada conector update_config: "conector[f].update_config (); funionó, se probó con un boton y un sensor y verificó que el codigo los reconocía correctamente desde el monitor del compilador. Pero probando con: ./lua bobot-server.lua DEBUG (Terminal) no funcionó, ahora el sensor de grises no aparece como unknown, sino como "grises", pero al desconectar y volver a conectar el anterior no se borra y aparece repetidas veces.
Luego de las primeras pruebas
Probando con el bobot-server, comprobamos que se detecta correctamente cuando se conecta/desconecta un sensor. Sin embargo, cuando conectamos/desconectamos sensores del mismo tipo, los nombres asignados no se actualizan. Es decir, si conectamos dos sensores del tipo X y listamos los sensores conectados (usando LIST), veremos conectados: X, X1. Al desconectar en este caso X1, veremos un comportamiento correcto. Pero, al conectar nuevamente el sensor, y listar apreciaremos: X, X2 La instancia debería ser 1 y no 2. Para solucionar este problema, relacionado con la cantidad de instancias de cada conector del handler, optamos por:
1) Crear una nueva estructura (un array de bytes), llamada instancias, en la cual guardaremos las instancias de cada conector, mapeandolos según los siguientes criterios:
byte globaltype = 12*conector[num_conector].get_type() + conector[num_conector].get_subtype();
En cada lugar del array, correspondiente a alguno de estos valores, guardaremos la cantidad de instancias de ese sensor.
| SENSOR_DISTANCIA | 10 |
| SENSOR_TEMPERATURA | 11 |
| SENSOR_LUZ | 12 |
| SENSOR_GRISES | 13 |
| SENSOR_BOTON | 30 |
| SENSOR_CONTACTO | 31 |
| SENSOR_TILT | 32 |
| SENSOR_VIBRACION | 33 |
| SENSOR_MAGNETICO | 34 |
| ACTUADOR_LED | 53 |
| MAX_CALLBACKS | 10 |
| SENSOR_POTE | 21 |
| UNKNOWN | 15 |
El objetivo primordial de esta estructura es tener en una variable global el numero de instancias, para poder actualizarlo en el procedimiento remove_module, ya que antes estas variables solo se podían modificar en get_config al agregar un nuevo sensor.
2) Modificamos la estructura H, agregándole un nuevo campo, instancia, que guardará a qué instancia de ese sensor corresponde el dispositivo ubicado en ese lugar del handler. De esta forma podremos acceder al valor de instacias totales para cada tipo de conector (buscando en el array instancias) y a su vez, al valor particular de cada sensor (que corresponde con la nomenclatura de su nombre). Es importante destacar, que cuando existe sólo un sensor conectado, en el array instancias habrá un 1, mientras que el valor de instancia en el handler será 0.
3)Una vez hecho esto, tenemos que actualizar distintas partes del código, para incluir las nuevas estructuras. En particular, hicimos cambios relevantes en los procedimientos get_config, add_module y remove_module.
- Luego de agregar las nuevas estructuras, volvimos a repetir las pruebas y sin embargo, el problema no se solucionó.
Conclusiones:
- Hasta este momento hemos logrado que se detecte correctamente cuando se conecta/desconecta un sensor. Sin embargo, a pesar de todos los cambios hechos, no hemos podido solucionar el problema de la nomenclatura de los conectores.
- El proyecto nos motivó mucho, ya que nos permitió utilizar herramientas que ya teníamos y observar de una forma mucho más práctica a la cual estamos acostumbrados, los cambios introducidos en el código.
- Nuestra idea es culminar el proyecto, tratando de solucionar el problema antes explicado.
Presentación de nuestro trabajo:
Para ver la presentación de nuestro proyecto:
Trabajo a futuro:
- Creemos que los cambios introducidos deberían permitirnos completar nuestro proyecto solucionando los problemas ahora existentes. Nuestro trabajo a futuro se centrará en identificar qué estamos haciendo mal, para poder cumplir íntegramente los objetivos planteados.
- Por otro lado, también evaluamos la posibilidad de incluir un "botón refresh" dentro del Tortugarte, para permitir al usuario, actualizar los sensores cuando lo desee.