
BIENVENIDOS AL PROYECTO BUTIÁ
SOLICITÁ AQUÍ UNA ACTIVIDAD BUTIÁ PARA TU LICEO, ESCUELA O UTU!
El Espacio de Formación Integral Butiá (EFI Butiá) desarrolla desde 2009 diversas acciones vinculadas a la robótica, enmarcadas en las tres funciones fundamentales de la Universidad: enseñanza, investigación y extensión.
La propuesta de robótica educativa se desarrolla en base a una plataforma robótica de software y hardware libre como es el kit Butiá, lo que permite generar una comunidad de investigadores, docentes, estudiantes, egresados y hobbistas, que crean sinergias en proyectos para su desarrollo, extensión y mejora continua, volcando esas mejoras a la comunidad. Esta retroalimentación constante permite un crecimiento de la propia comunidad e ir generando experiencias de cada vez mayor riqueza.
Entre sus tareas de enseñanza, el EFI Butiá implementa cursos de grado (robótica educativa y robótica embebida), posgrado y educación permanente (cursos de formación para docentes y educadores de enseñanza primaria, secundaria y no formal). En relación a la extensión se realizan actividades en el medio (talleres de sensibilización en robótica para niños y adolescentes y participación en seminarios y eventos).
Finalmente, a nivel de investigación se desarrollan líneas de trabajo aplicada en los sistemas periféricos (sensores y actuadores), control del robot y ambientes y paradigmas de programación que puedan poner al alcance de niños y adolescentes los conceptos iniciales de programación.



OTRAS FORMAS DE COMUNICACIÓN:
Lista de correo
Subscribite y enterate de todas las novedades e intercambia información
Lista de correo de desarrollo
Se parte del desarrollo de la plataforma butiá
Wiki butiá!
Podrás encontrar tutoriales y documentación del proyecto
Fotos en flickr!
NOVEDADES
En Casa INJU se dio inicio a una nueva jornada de las "Niñas en las TIC", con la participación de de autoridades del Ministerio de Industria, Energía y Minería (MIEM); el Instituto del Niño y Adolescente del Uruguay (INAU); el Instituto Nacional de la Juventud (INJU), Facultad de Ingeniería de la Universidad de la República (FING- UdelaR); y el Ministerio de Educación y Cultura (MEC).

La Revista de Educación a Distancia (RED) nació en 2001 vinculada a los estudios propios de la Universidad de Murcia organizados, desde el Departamento de Psicología Evolutiva y de la Educación, para apoyar y difundir los materiales que se producían entonces en el seno de los citados cursos. Actualmente RED se define como una publicación digital de naturaleza científica, en el sentido de que contribuye a la difusión de investigaciones, experiencias y reflexiones cualificadas sobre los tópicos que le son propios, y se declara como participe y defensora de los principios del acceso abierto (open access) como sistema de ideas y procedimientos para la difusión del conocimiento. Compartimos un artículo escrito en conjunto por docentes de la Facultad de Ingeniería (UdelaR), de secundaria (ANEP-CES), del Instituto Tecnológico de Massachusetts (MIT, Estados Unidos) e integrantes de SugarLabs, titulado "Sensores Tortuga 2.0: Cómo el hardware y software abiertos pueden empoderar a las comunidades de aprendizaje", donde se describe un enfoque abierto del uso de la computación, que sostiene que el hardware y software libres empoderan y enriquecen el aprendizaje de los estudiantes y sus comunidades.

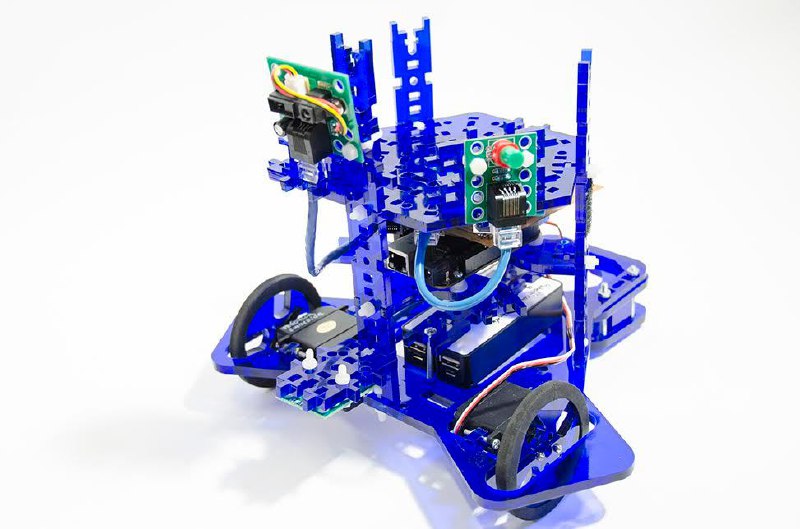
Este martes primero de septiembre realizamos el lanzamiento de la nueva plataforma robótica 3.0: el robot Butiá Detí. Realizamos una charla sobre la nueva plataforma, un workshop sobre el proyecto, e inauguramos una fotogalería, ubicada en la senda Landoni (Entre la Facultad de Ingeniería y el edificio polifuncional José Luis Massera). Estamos muy contentos, y agradecemos a todas las personas que nos acompañaron ese día y durante el desarrollo del mismo.
Bruno Michetti y Andrés Aguirre dieron una charla sobre el proyecto Butiá en la segunda jornada de profesores de informática realizada por el CFE. Hablaron sobre la relación de Butiá con la educación y el enfoque del software y hardware libre. Te mostramos una foto de la charla:


El proyecto Butiá participó en la Expo Milán 2015, y aquí te dejamos el video que se expuso por parte de Uruguay. Se llama La vida crece en Uruguay. Miralo!
El proyecto Butiá participó en FLISOL 2015 en Florida, junto a otros proyectos libres. Te dejamos un resumen de las charlas que hubo. Muy buenas!
La visita desde Suecia de nuestro amigo Staffan Hessell tuvo repercusiones, aquí te mostramos el artículo que realizó el diario La República al respecto. Gracias nuevamente Staffan!

Andrés Aguirre y Bruno Michetti visitaron el país vecino, representando al proyecto y a la UdelaR en la V Muestra de Ciencia y Tecnología de Mercociudades. Dicho evento tiene como objetivo que universidades, y empresas de la región puedan ver y a su vez mostrar los desarrollos tecnológicos, diseñados para mejorar la calidad de vida de los habitantes y la comunicación de los diversos países. Nosotros pusimos stand e hicimos una charla sobre nuestro trabajo. Fue una experiencia enriquecedora y generamos muchos vínculos con personas de varios países latinoamericanos interesadas en lo que hacemos. (Página del evento)
Te Mostramos algunas fotos:


En la semana del 6 al 12 de abril, Andrés Aguirre viajó a Honduras para presentar el proyecto Butiá en la XV Jornada Internacional de actualización Tecnológica para Ingeniería. Además se trabajó en un acuerdo de cooperación entre la Udelar y la UTH para implantar un nodo de robótica educativa en centro América.

Nos visitó Staffan Hessel, un pedagogo sueco amigo del proyecto que nos sigue desde hace tiempo. Nos acompañó a dar un taller de sensibilización el 20 de marzo a la escuela nro 255. Sacó fotos y videos y quedo contentísimo. Compartimos el artículo realizado por él sobre Butiá. Gracias Staffan!!

"El Proyecto Butiá se ha ganado un lugar en gran parte de los centros educativos del país, partiendo desde una premisa simple pero sobre todo innovadora: construir robots de bajo presupuesto, aprovechando las computadoras facilitadas por el Plan Ceibal como parte del prototipo, para así promover el estudio de la robótica entre los jóvenes..."

"Proyecto Butiá surgió en 2009 con la idea de convertir a las XO en robots, pensando en la robótica como una herramienta educativa. A través de distintos encuentros, Butiá ha llegado a 3.500 niños y jóvenes de todo el país que investigan, crean y programan robots. A diferencia de otros kits de robótica, Butiá busca que el estudiante se ponga del lado de desarrollador, y no sea simplemente un usuario. La concepción de educación constructivista detrás del proyecto surge como una respuesta a las necesidades de estudiantes jóvenes de aprender haciendo y apropiarse de su conocimiento. Hablamos con el equipo de Proyecto Butiá sobre su experiencia con docentes y alumnos de todo el país..."
Mirate la entrevista completa!

Uruguay participará, junto a otros 144 países, en la Expo Milán 2015 donde se expondrán distintas soluciones a la problemática “Alimentar al planeta, Energía para la Vida”. Entre los proyectos a presentar, se encuentra Butiá! mirate el video!
 Ver noticia
Ver noticia
"Butiá es un proyecto que involucra todas las funciones universitarias, desde la parte de enseñanza, a la parte de investigación y extensión universitaria (...) busca usar la herramienta robot como excusa, para generar interés y motivación en los estudiantes; y vincularla como una herramienta más en la educación..."
Piloto del programa I+D+i sobre tecnología y ciencia. Incorporando varios cambios y con un enfoque que se acerca más a la ficción, el proyecto ahora denominado “Homo Ludens”, tiene rodaje previsto para mayo de 2015. "La robótica se encuentra presente en muchos aspectos de nuestro día a día, pero lejos de parecerse al imaginario con que se la muestra en los libros o en las películas de ciencia ficción, los robots de nuestra vida cotidiana adoptan las más diversas formas y funciones (...). Aquí en la facultad de ingeniería se realizan realizan diversas actividades relacionadas a la robótica, entre ellas, proyecto Butiá y sumo robótico..."
"Turtle Art es una plataforma de software gráfica. Es suficientemente sencilla como para incentivar a los niños a aprender programación, pero a la vez tan poderosa, como para permitir desarrollar aplicaciones de interés a personas de todas las edades. Estas cualidades hacen que sea la plataforma utilizada en el proyecto Butiá, una iniciativa de la Facultad de Ingeniería con el apoyo de Antel para fomentar el uso y aprendizaje de la robótica."
Leer articulo completoHemos abierto un llamado a proyectos/contest para quienes tengan un proyecto de robótica, domótica, mecátronica entre otros o quieran usar la placa de entrada/salida USB4Butia[1] con fines educativos.
Solo tienen que proponer el proyecto, si es seleccionado les proporcionamos la placa USB4Butiá y los accesorios para llevarla acabo.
Fechas importantes:
- 31 de agosto: cierre del llamado.
- 6 de setiembre: publicación de los proyectos aprobados.
- 11 de setiembre: entrega de equipamiento en el marco del sumo.uy.
Se reciben los proyectos mediante este formulario:
Leer más
Entre otros los temas que se tratarán son:
- Aspectos generales de la robótica
- Familiarización
- Trabajo con el robot y su introducción al aula.

Más info..
INSCRIPCIONES
Categoría Escolar:
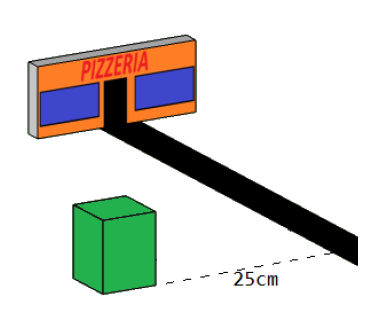
En la pizzería Pizza&Chips están muy preocupados por el incremento de pedidos en el último mes. Para optimizar los tiempos de entrega de los mismos han decidido tener un robot que sea capaz de cumplir con la tarea. Este desafío consiste en desarrollar un robot autónomo móvil capaz de entregar un pedido en el menor tiempo posible. Esta categoría UNICAMENTE para estudiantes escolares. Para participar de esta categoría la estrategia deberá cumplir con el reglamento de la categoría Escolar.
Categoría Básica:
Este desafío consiste en desarrollar un robot autónomo móvil capaz de entregar la totalidad de pedidos en el menor tiempo posible. En tal sentido, el robot debe ser capaz de moverse por el escenario identificando las casas donde debe entregar los pedidos. Para recorrer la ruta de entregas podrá valerse de una línea negra que representará la calle de la ciudad. Las casas donde debe entregar el pedido estarán ubicadas a un lado de la calle. Para participar de esta categoría la estrategia deberá cumplir con el reglamento de la categoría Básica.

Categoría Avanzada:
PRÓXIMAMENTE..
Ver más..
En el marco del Concurso Latinoamericano de Robótica participaron 3 equipos de estudiantes y egresados de Facultad de Ingenieria, Universidad de la república. Se realizó en Fortaleza- Brasil del 16 al 21 de octubre de 2012 y contó con la participación de varios países como Brasil, Venezuela, Colombia, México, Chile entre otros.
El equipo que comanda el Monster Butia compitió en el 11 Institute of Electrical and Electronics Engineers (IEEE) en la categoría OPEN, la cual año a año propone un desafío de la vida real para que los participantes compitan en el desarrollo de un robot que logre solucionar el problema.
Este año el desafío consistía en desarrollar un robot limpiador de playas, solucionando el problema de la acumulación de residuos que afecta a las de las playas latinoamericanas. Se trata de un robot autónomo que tenga los requerimientos necesarios para desplazarse en la arena, esquivar obstáculos, recoger residuos y depositarlos en los botes de basura. Con este tipo de proyectos se apunta también a la reflexión y concientización de la sociedad sobre la problemática ambiental que sufrimos actualmente.



15/10/2012

"USB4butia - A Truly Free (as in Freedom) Input/Output Board"
03/10/2012 - 06/10/2012
Categoría Butiá Básico:
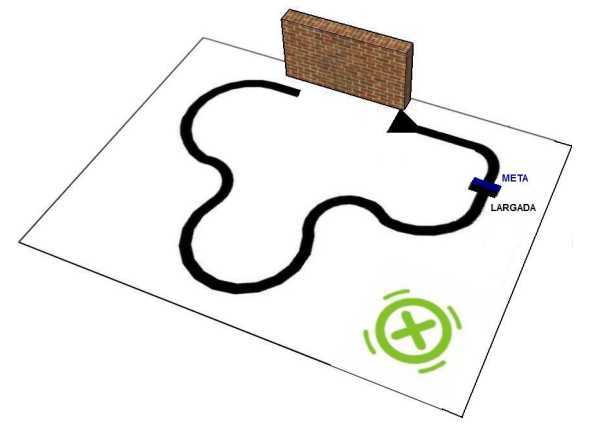
La categoría Butiá básica está inspirada en una de las tareas simples que debe realizar un robot móvil. Dicha tarea implica seguir un recorrido predeterminado que estará señalizado mediante una línea negra pintada sobre un suelo blanco. El objetivo es recorrer la pista siguiendo la línea negra y las paredes que dichas contienen en el menor tiempo posible utilizando un robot Butiá. Este desafío está compuesto por tres etapas, cada una de mayor dificultad que la precedente. Las tres etapas son:
- Seguidor de líneas.
- Seguidor de líneas y una pared en posición fija.
- Seguidor de líneas y paredes en posiciones variables.
Categoría Butiá Avanzado:
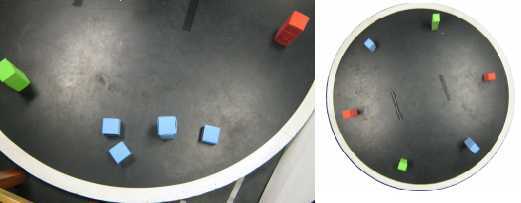
El objetivo consiste en desarrollar un robot butiá para realizar la demolición de una serie de edificios identificados por su color. Los colores identifican si los edificios están habilitados o inhabilitados. El robot debe demoler los edificios inhabilitados, sin tocar los habilitados. Descripción El escenario estará compuesto de un dohyo que representa la ciudad, 6 edificios de diferentes alturas compuestos por cubos de madera recubiertos de goma eva. Los cubos son de 5cm de lado cada uno. Esta categoría está pensada para estudiantes liceales que poseen un robot Butiá. Para participar de esta categoría la estrategia deberá cumplir con el reglamento de la categoría Butiá Avanzado.
Ver más..
El 19, 20 y 21 de julio en Duranzo, en el marco de un proyecto entre PEDECIBA y ANEP, ser realizaron talleres de capacitación en programación y robótica para docentes y maestros, de diferentes localidades del país, sobre la plataforma Butiá. Al finalizar la actividad cada participante recibiró un robot Butiá para poder trasladar lo aprendido a su trabajo de aula.
Link a fotos

La gente del Liceo de Villa del Carmen,Durazno, viene realizando una estupenda labor. Luego de haber asistido a un taller brindado por nuestro equipo, se han dedicado a armar su propio robot butiá partiendo mayormente de piezas recicladas y además han documentado todo en forma de video tutoriales y en su blog . Abajo los videos realizados por ellos.
Videos sobre el taller que recibieron



Tutorial para soldar los componentes en la placa USB4butiá

Componentes necesarios y su ubicación en la placa USB4butiá

Mas información en https://www.fing.edu.uy/inco/eventos/sumo.uy/
En los links, las letras de los desafíos Butiá, básico y avanzado.
Desafio Butiá básico.
Desafio Butiá avanzado.
*Próximamente videos ilustrativos sobre cada categoría.
Ver Ubicación de robots Butiá en un mapa más grande
PUNTOS DEL PAÍS DONDE SE ENCUENTRA UN ROBOT BUTIÁ
Para inscribirse es obligatorio completar la inscripción web en
Página de inscripción
La primer clase será este lunes 27 de febrero a las 17 horas en el salón 015. La asignatura tiene cupo.
Se puede consultar más información en página del curso en:
Página del curso

|
El cual resume la experiencia que hemos tenido en el último año y medio con el Proyecto Butiá en escuelas y liceos




21/03/2011
28/02/2011
MODULO DE TALLER PARA ESTUDIANTES DE LA CARRERA INGENIERIA EN COMPUTACION, INGENIERIA ELECTRICA y MECÁNICA. Comienza un módulo de taller en el cual los estudiantes podrán conocer las bases de la robótica, programar aplicaciones y comportamiento para el robot en las XO, y fomentar su trabajo en diferentes liceos del país.
Se aceptaran inscripciones hasta el DOMINGO 20 DE MARZO de 2011. Las inscripciones deben realizarse mandando un e-mail a la dirección butia@fing.edu.uy con el asunto "INSCRIPCION" que contenga:
- Nombre y apellido del estudiante
- Cédula del estudiante
- Carrera de la cual proviene
newsgroup : fing.cursos.mtbutia
El equipo Butiá visitá los liceos del interior Parte del equipo responsable del proyecto Butiá de la facultad de ingeniería en conjunto con estudiantes de la asignatura "Módulo de Taller Butiá" se hicieron presente en casi todos los liceos públicos del interior del país que recibieron un robot. Además se realizó un taller donde todos los estudiantes presentes debieron resolver desafíos mediante la programación del comportamiento del robot. En todos los casos los estudiantes se mostraron muy entusiasmados en la actividad realizada.
En dicha actividad los estudiantes y profesores de cada liceo nos contaron como venía siendo su trabajo con el robot, problemas a los cuales se habían enfrentado y como los resolvieron. Podemos agregar que en muchos casos nos contaron como habían integrado al robot en las diferentes actividades se habían realizado en el liceo en los últimos meses (p.e. Fiestas de fin de cursos, talleres, etc.).



28 liceos públicos del país recibieron su robot butiá. En el primer dáa del evento SUMO.UY del corriente año 28 liceos píblicos de todo el país se hicieron presentes en el "Estadio de Sumo Robótico" en la Facultad de Ingeniería para recibir su robot butiá. Durante toda a jornada los estudiantes participaron de seminarios sobre robótica, el proyecto butiá y conceptos básicos de programación. Luego realizaron un taller donde aplicaron los conocimientos recién adquiridos sobre el robot. Durante toda la jornada cada liceo tuvo asignado un estudiante de módulo taller "butiá" cómo referente. Cada estudiante fue el responsable de hacer el traspaso de conocimientos a los jóvenes y profesores de los liceos que nos visitaron.
En la siguiente imagen podemos ver estudiantes y profesores trabajando en equipo con los estudiantes de la facultad de ingeniería y aprendiendo sobre el funcionamiento del robot butiá.

A partir de ahora la idea es que cada liceo arme un grupo de estudiantes interesados los temas de programación y robótica para trabajar con el butiá a nivel local. En el correr de estas semanas esperamos comenzar a realizar visitas a dichos centros estudiantiles para que nos muestren en que han trabajado así cómo hacer algunos talleres con los estudiantes que no pudieron concurrir al evento SUMO.UY 2010.

02/08/2010
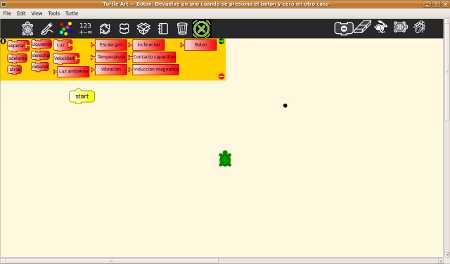
En esta primera imagen podemos ver el entorno de trabajo que posee la aplicación Tortugarte, y se puede apreciar que el último símbolo del menú de piezas es el logo Butiá. Una vez que hacemos click en dicho logo, obtenemos un conjunto de elementos que nos permite trabajar con la mayoría de las utilidades del robot.
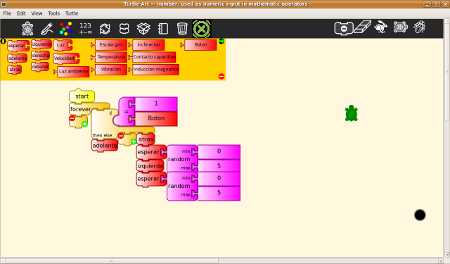
En la imagen siguiente podemos ver la forma en que fueron colocadas las piezas para obtener cierto comportamiento. En este caso el programa lo que hace es avanzar mientras el sensor "botón" no está presionado. En caso de estar presionado, retrocede, gira en el lugar y luego vuelve a avanzar. Esta es una manera de evitar obstáculos.
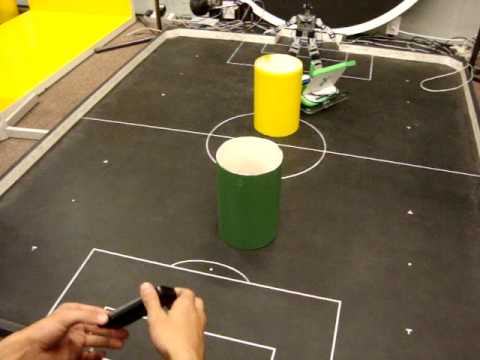
Finalmente les dejamos el video del robot en acción corriendo el algoritmo presentado anteriormente.

24/06/2010
MediaLab del MIT ( Massachusetts).Institute of Technology SugarLabs desarrolla software educacional y entre su software más destacado aparece el sistema operativo de la XO, el "Sugar". Tras su visita le contamos un poco de que se trataba el proyecto y finalmente hicimos unas demos, en la cuales él participó de forma activa.
Más información sobre Walter Bender en https://en.wikipedia.org/wiki/Walter_Bender

22/06/2010
MODULO DE TALLER PARA ESTUDIANTES DE LA CARRERA INGENIERIA EN COMPUTACION E INGENIERIA ELECTRICA. A raíz de el desarrollo que está teniendo el robot butiá se abriá un módulo de taller en el cual los estudiantes podrán conocer las bases de la robótica, programar aplicaciones y comportamiento para el robot en las XO, y fomentar su trabajo en diferentes liceos del país.
Se aceptaran inscripciones hasta el viernes 4 de junio del 2010. Las inscripciones deben realizarse mandando un e-mail a la dirección butia@fing.edu.uy con el asunto "INSCRIPCION" que contenga:
- Nombre y apellido del estudiante
- Cédula del estudiante
- Carrera de la cual proviene
Adjuntamos el programa del curso: Programa Módulo Taller
newsgroup : fing.cursos.mtbutia
A continuación exponemos algunos videos de lo que pudimos hacer con el robot butiá...

A modo de ejemplo, mostramos el código cliente que corre en el celular G1 Google Phone. El código utilizado para el Open Moko es muy similar, lo que cambia son las funciones utilizadas para obtener la rotación de los ejes (x e y) del acelerómetro. El código esta todo en lenguaje Python. Este es el lenguaje que viene instalado en las xo con un entorno de desarrollo y muchos ejemplos.
droid = android.Android()
butiabot = butiaAPI.robot()
modulos = butiabot.listarModulos()
butiabot.abrirMotores()
s = droid.startSensing()
time.sleep(1)
s = droid.readSensors()
y1 = s.result[
x1 = s.result[
x1 = 45
x1 = -45
y1 = 45
y1 = -45
xplusy = x1 + y1
yminusx = y1 - x1
sentidoIzq = 0
xplusy = abs(xplusy)
sentidoIzq = 1
sentidoDer = 0
yminusx = abs(yminusx)
sentidoDer = 1
xplusy = xplusy*22
yminusx = yminusx*22
xplusy = 990
yminusx = 990
butiabot.setVelocidadMotores(str(sentidoDer), str(yminusx), str(sentidoIzq), str(xplusy))
droid.stopSensing()

En este caso nuestro programa servidor se está ejecutando en la "ceibalita" mientras que el programa cliente se ejecuta en el celular. El servidor que corre en la XO como ya mencionamos en otras entregas está hecho en lua en su gran mayoría. Por otro lado el programa cliente que corre en el celular esta hecho en python.
Los pasos para para realizar esta tarea con éxito fueron los siguientes:
1- Conectar la XO a un router.
2- Ejecutar el programa servidor en la XO.
3- Conectar el celular al mismo router.
4- Configurar el archivo butiaAPI.py con el puerto y el socket deseado en el que "escucha" la XO.
5- Ejecutar el programa butiaRemoto.py
A continuación tenemos un video que nos muestra los resultados de la aplicación:




