Grupo de Investigación MINA MINA research group
Network Management / Artificial Intelligence
Novedades News
Nueva publicación! New paper!
Transport Protocols in the Data Center: Understanding Proposals and Research Challenges Transport Protocols in the Data Center: Understanding Proposals and Research ChallengesSe viene el Workshop Usabilidad Y Gestión Inteligente De Sistemas Ciber Físicos! The Workshop on Usability and Intelligent Management of Cyber-Physical Systems is coming soon!
3 al 20 de noviembre! Conocé más From november 3 to 20! Learn more
SUMO 2025! Sumo Circo SUMO 2025! Circus Sumo!
Mirá las fotos! Look at the photos!Nueva publicación! New paper!
LQ-GNN: a Graph Neural Network Model for Response Time Prediction of Microservice-based Applications in the Computing Continuum LQ-GNN: a Graph Neural Network Model for Response Time Prediction of Microservice-based Applications in the Computing Continuum
Dictamos el Taller Butiá - Robots a bailar! en el día internacional de las niñas en las TICs We dictated the Butiá Workshop - Robots to dance! on the international day of girls in ICT
Mirá las fotos! Look at the pictures!Día Internacional de la Mujer International Women's day
8 de marzo March 8
Leonardo Alberro ganó el premio a mejor tesis de maestría de PEDECIBA We have a new Msc!
Lee la tesis! Read the thesis!
Tenemos una nueva magíster! We have a new Msc!
Felicitaciones a la Magíster Belén Brandino! Congrats to the Msc. Belén Brandino!
Tenemos una nueva doctora! We have a new PhD!
Felicitaciones a la Doctora Ewelina Bakała! Congrats to the Dr. Ewelina Bakała!Sobre Nosotros About Us
Grupo MINA MINA Group
Sistemas Ciberfísicos Cyber-Physical Systems
En el grupo de investigación MINA conviven expertos en robótica, en sistemas de comunicaciones, en sistemas multi-agente, en redes de sensores, IA aplicada, sistemas embebidos, y sistemas autonómicos. En definitiva, agrupa investigadores de las principales disciplinas de investigación de los Sistemas Ciber Físicos(SCF) o, en inglés, Cyber-Physical Systems, que integran computación, redes y procesos físicos, con bucles de realimentación donde procesos físicos impactan sobre procesos de cómputo y viceversa. Experts in robotics, communications systems, multi-agent systems, sensor networks, applied AI, embedded systems, and autonomous systems met in the MINA research group. In short, the group brings together researchers from the main Cyber-Physical Systems disciplines (CPS), which integrate computing, networks, and physical processes, with feedback loops where physical processes impact on computation processes and vice versa.
Integrantes Members

Eduardo Grampín
Dr, G5 DT (Coordinación) PhD, Professor (Coordination)
Gonzalo Tejera
Dr, G5 DT (Coordinación) PhD, Associate Professor (Coordination)
Facundo Benavides
Dr, G3 DT (Coordinación) PhD, Assistant Professor (Coordination)
Javier Baliosian
Dr, G5 DT PhD, Associate Professor
Sofía Tito Virgilio
estudiante de maestría, G1 MSc student, Teaching Assistant
Belén Brandino
MSc, G2 MSc, Teaching Assistant
Leonardo Alberro
estudiante de doctorado, G2 PhD student, Teaching Assistant
Guillermo Trinidad
estudiante de doctorado, G2 PhD student, Teaching Assistant
Federico Rivero
estudiante de maestría, G3 MSc student, Teaching Assistant
Ewelina Bakała
Dr, G2 PhD, Teaching Assistant
Mercedes Marzoa
estudiante de doctorado, G2 PhD student, Teaching Assistant
Federico Andrade
estudiante de doctorado, G2 PhD student, Teaching Assistant
Jorge Visca
Dr, G3 DT PhD, Assistant Professor
Matías Richart
Dr, G3 DT PhD, Assistant Professor
Alberto Castro
Dr, Posdoc, G3 PhD, Posdoc, Assistant Professor
Martín Llofriu
Dr, G2 PhD, Teaching AssistantLas líneas de investigación Research Lines
del Grupo MINA
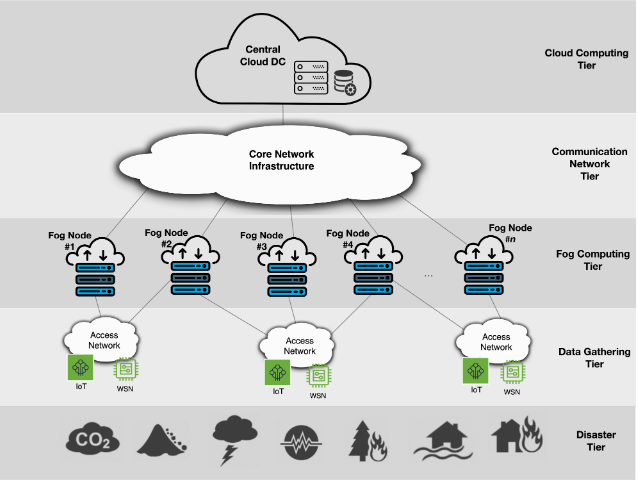
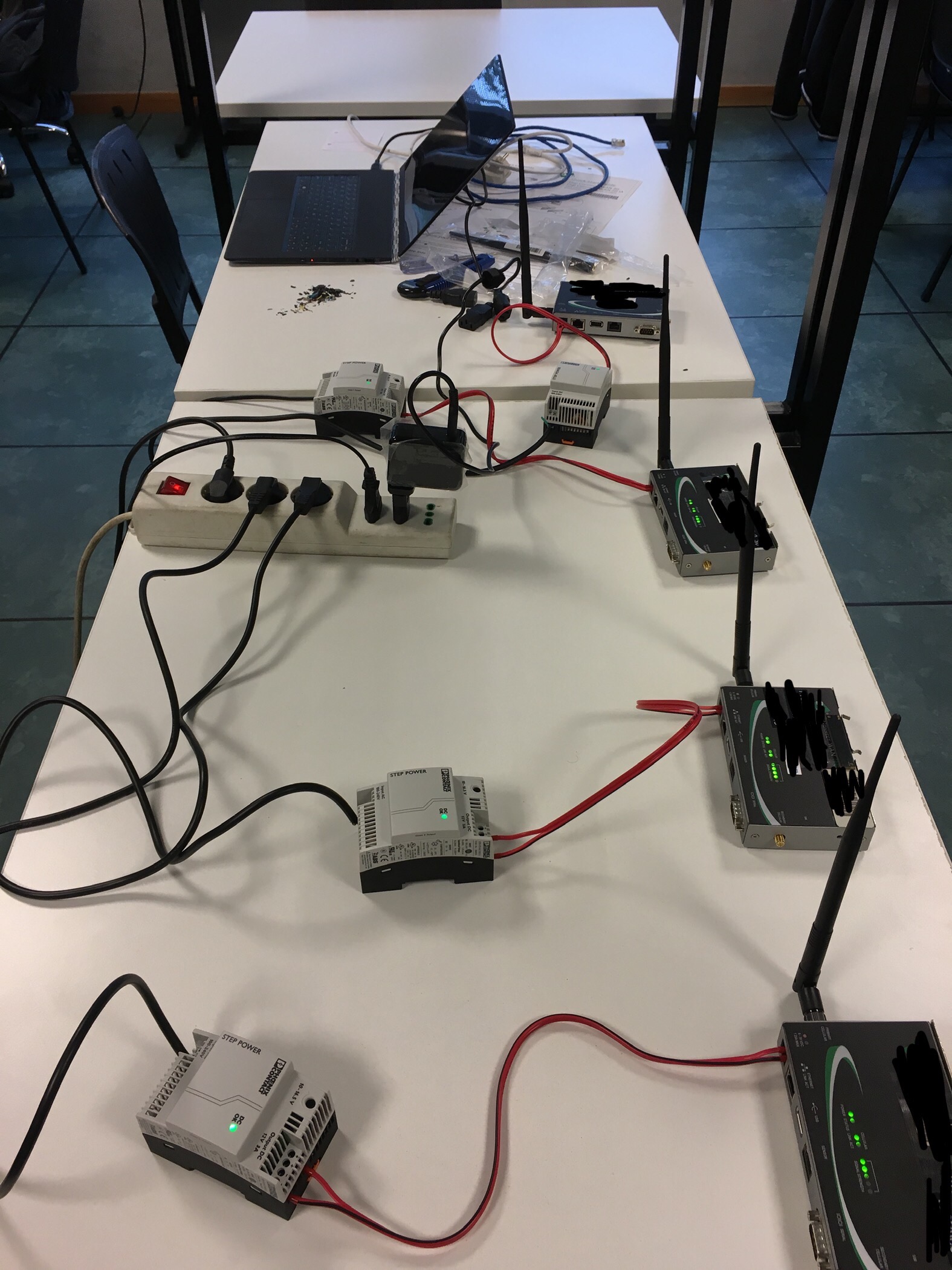
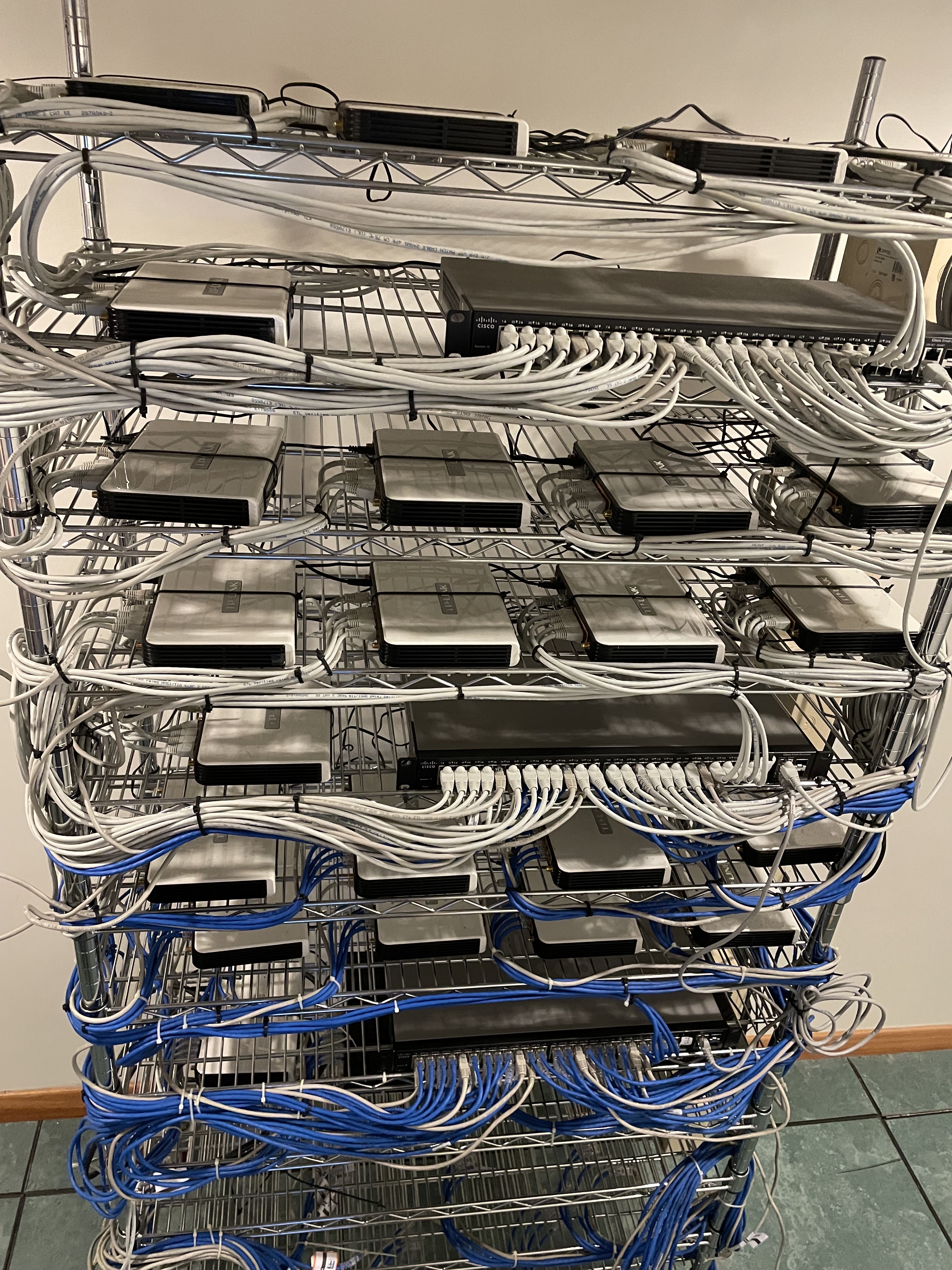
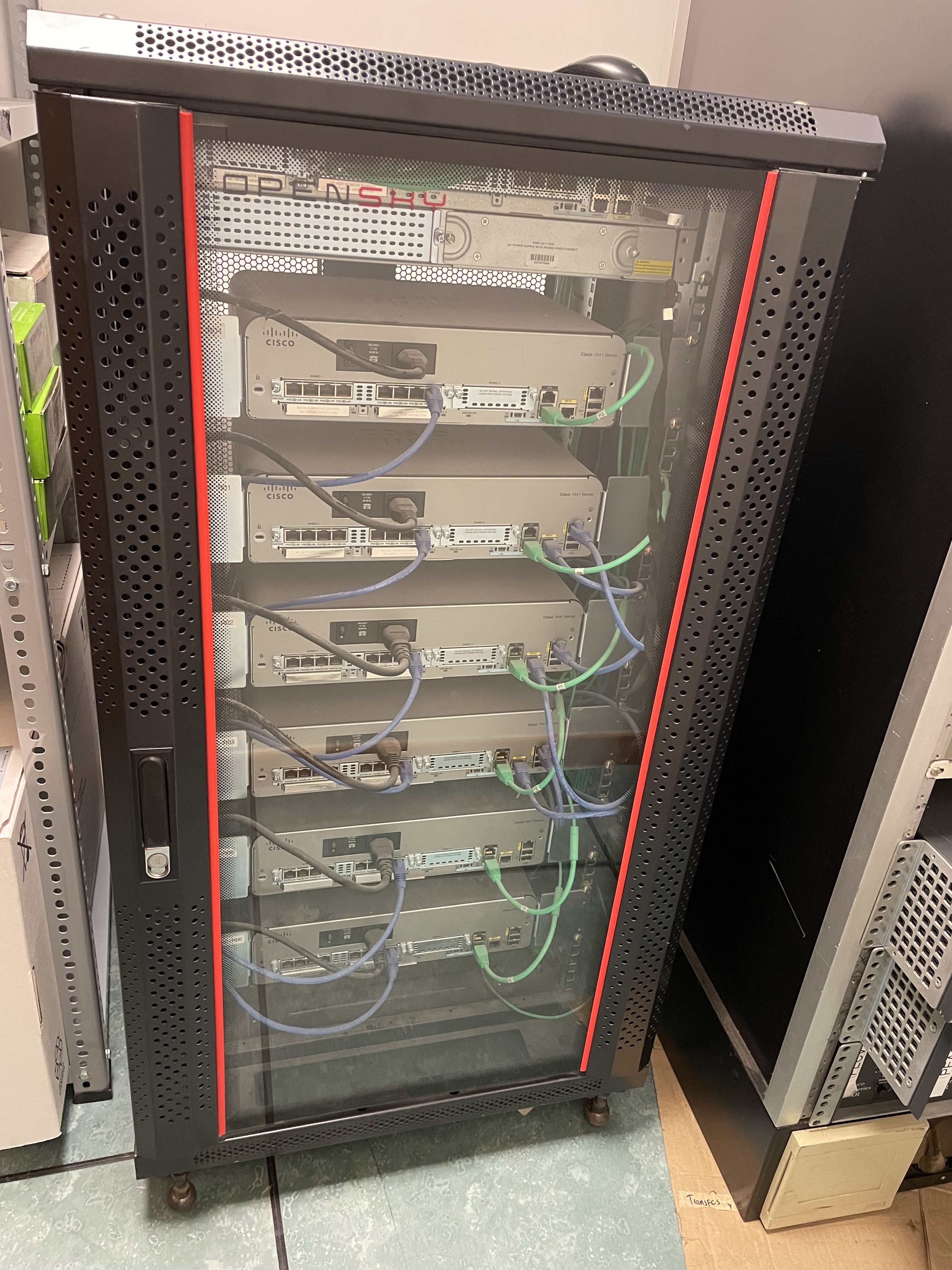
Gestión de los recursos de los SCF CPS resource management
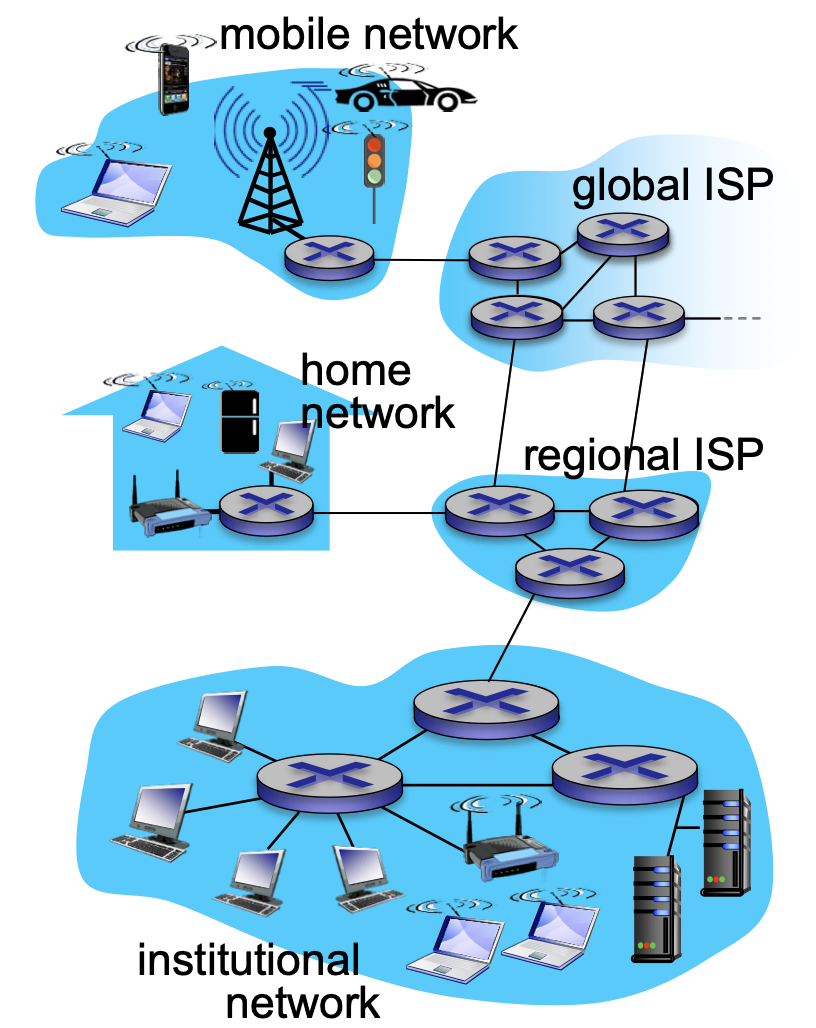
Los SCF imponen fuertes restricciones sobre los recursos que utilizan, en particular, sobre las redes de comunicaciones. CPS impose strong restrictions on the resources they use, in particular, on communication networks.
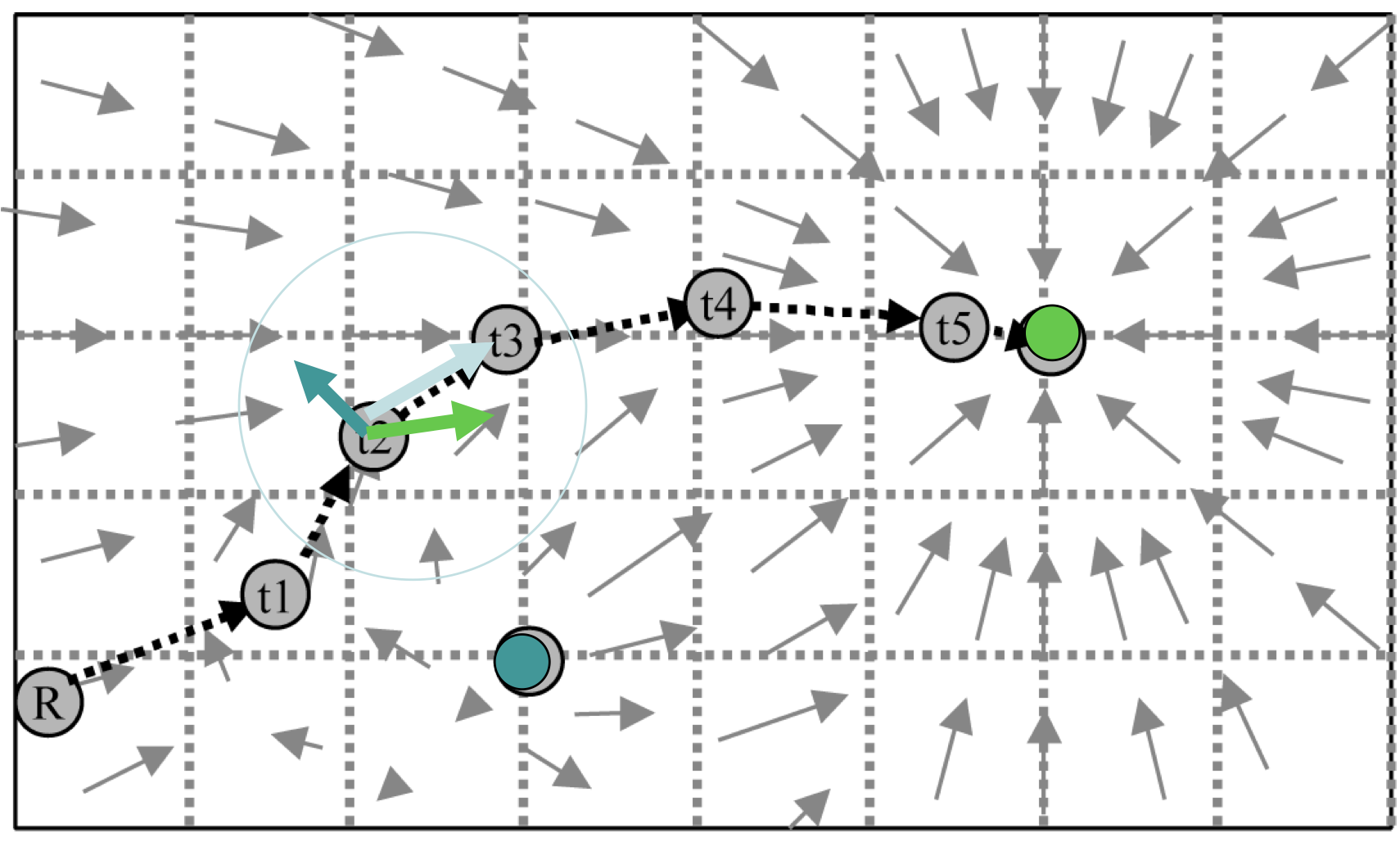
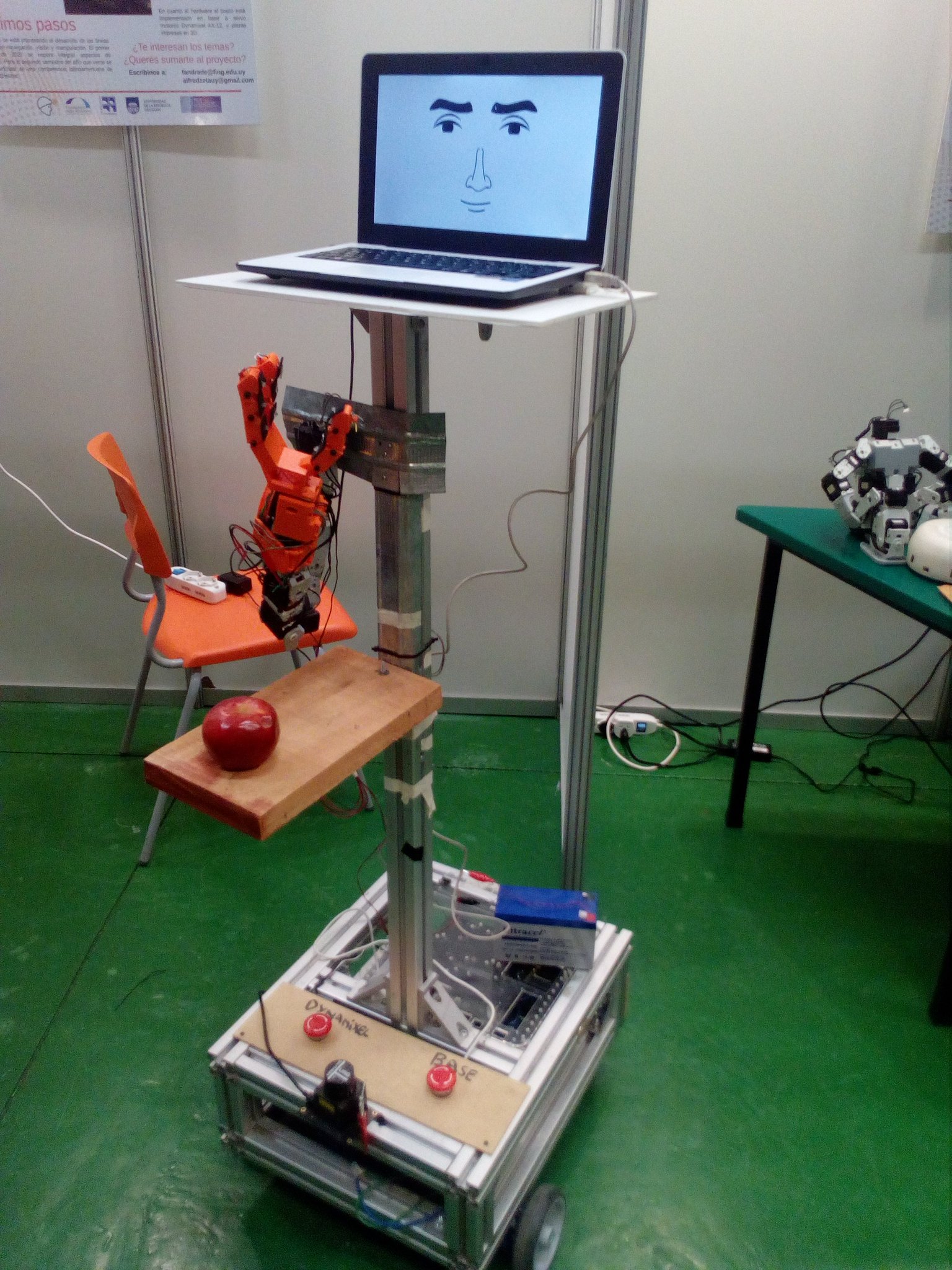
Leer más Read moreNavegación robótica Robot navigation
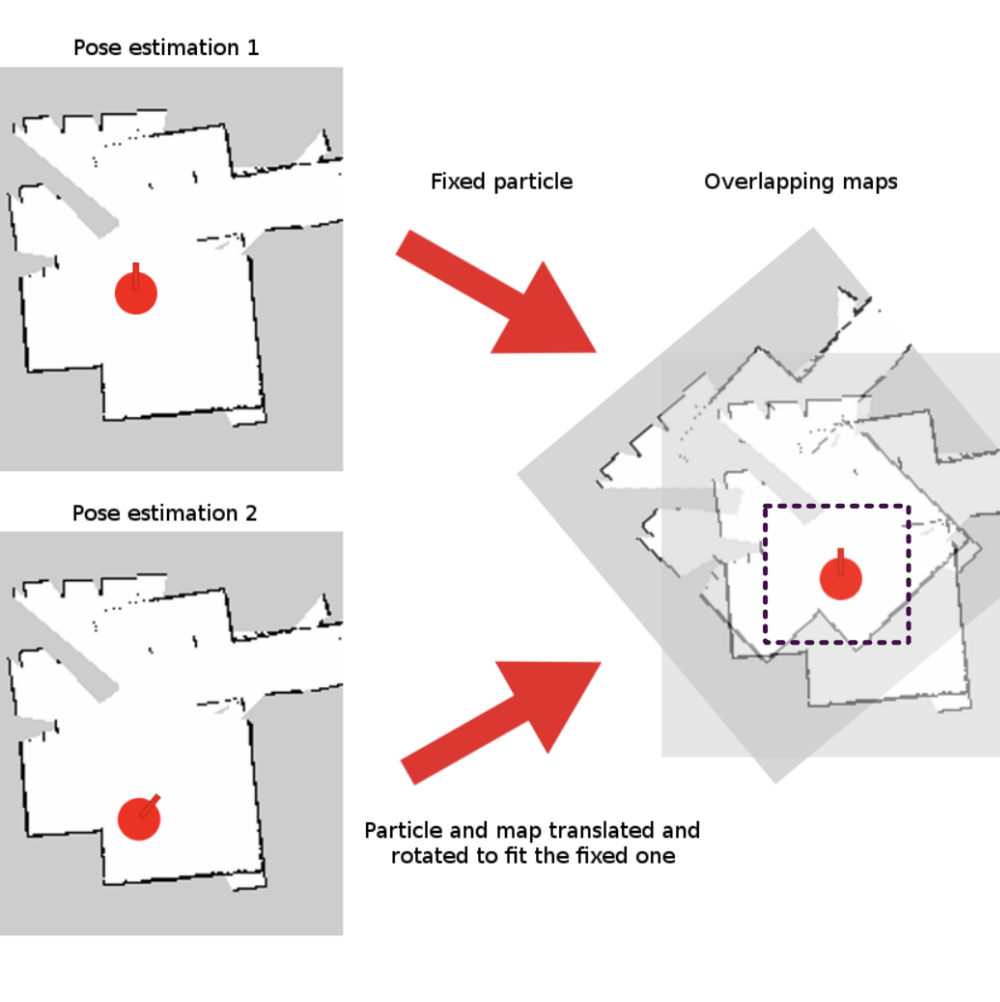
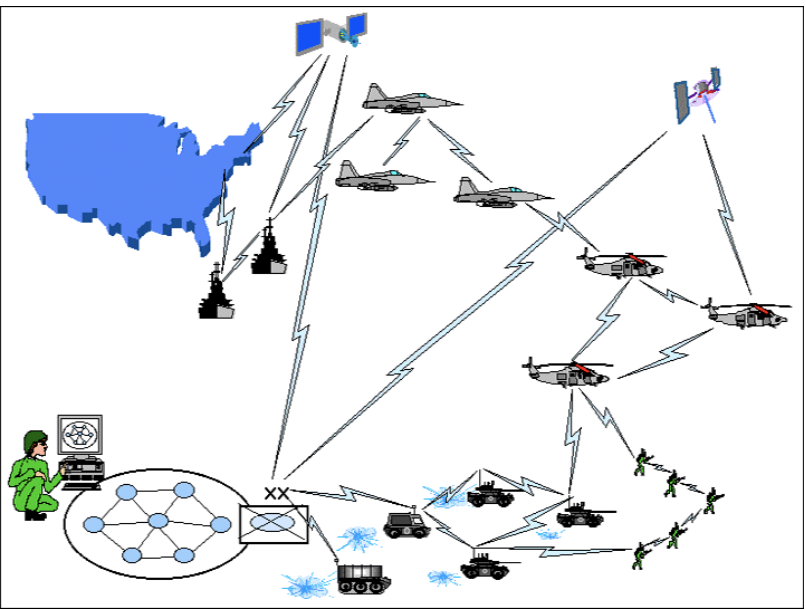
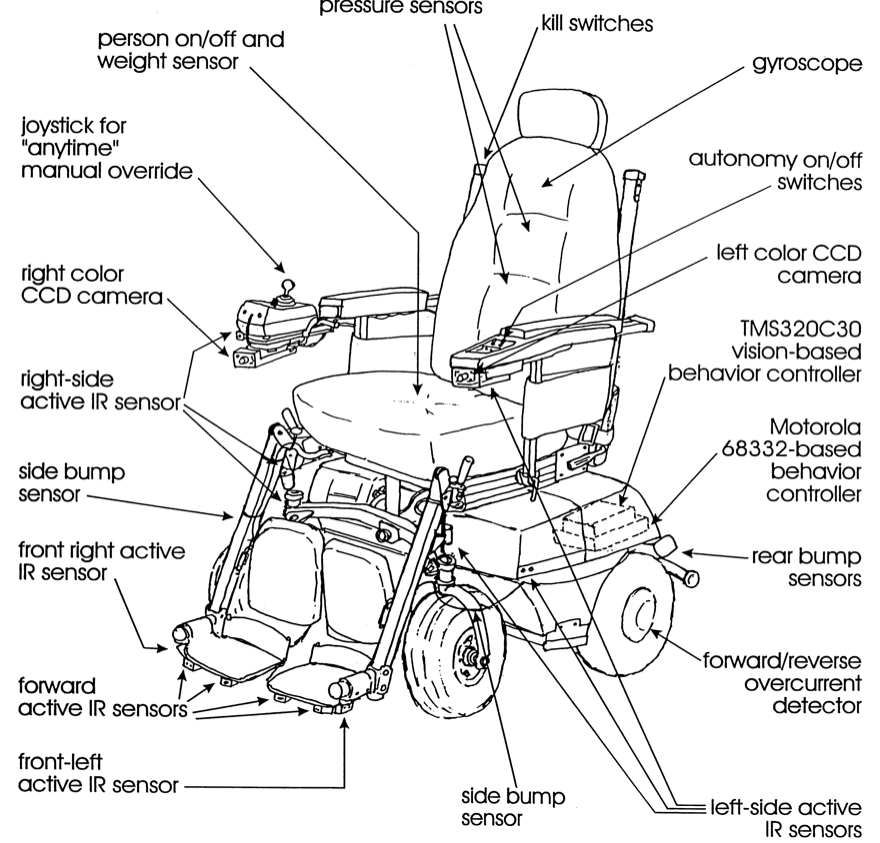
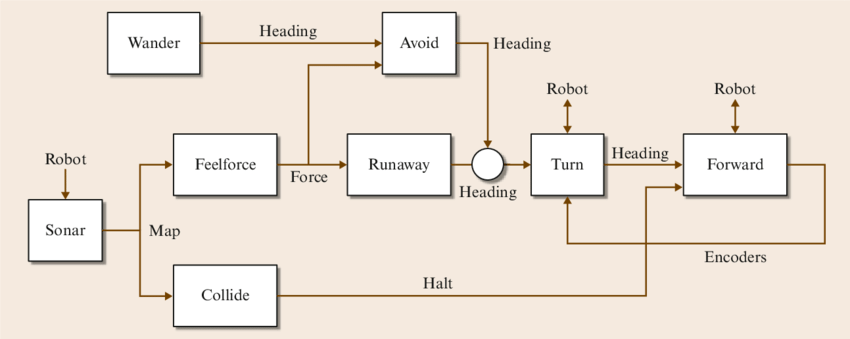
La navegación es una de las actividades más importantes y desafiantes que deben tenerse en cuenta al trabajar con un robot móvil. Navigation is one of the most important and challenging activities to consider when working with a mobile robot.
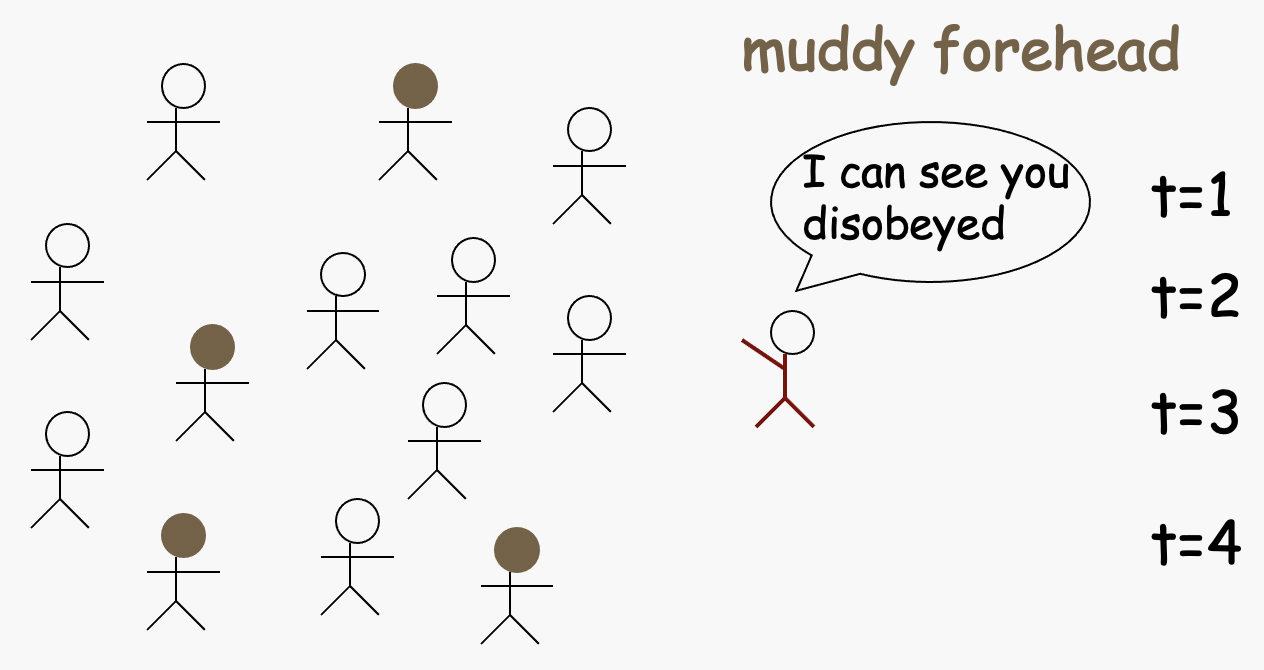
Leer más Read moreToma de decisiones Decision making
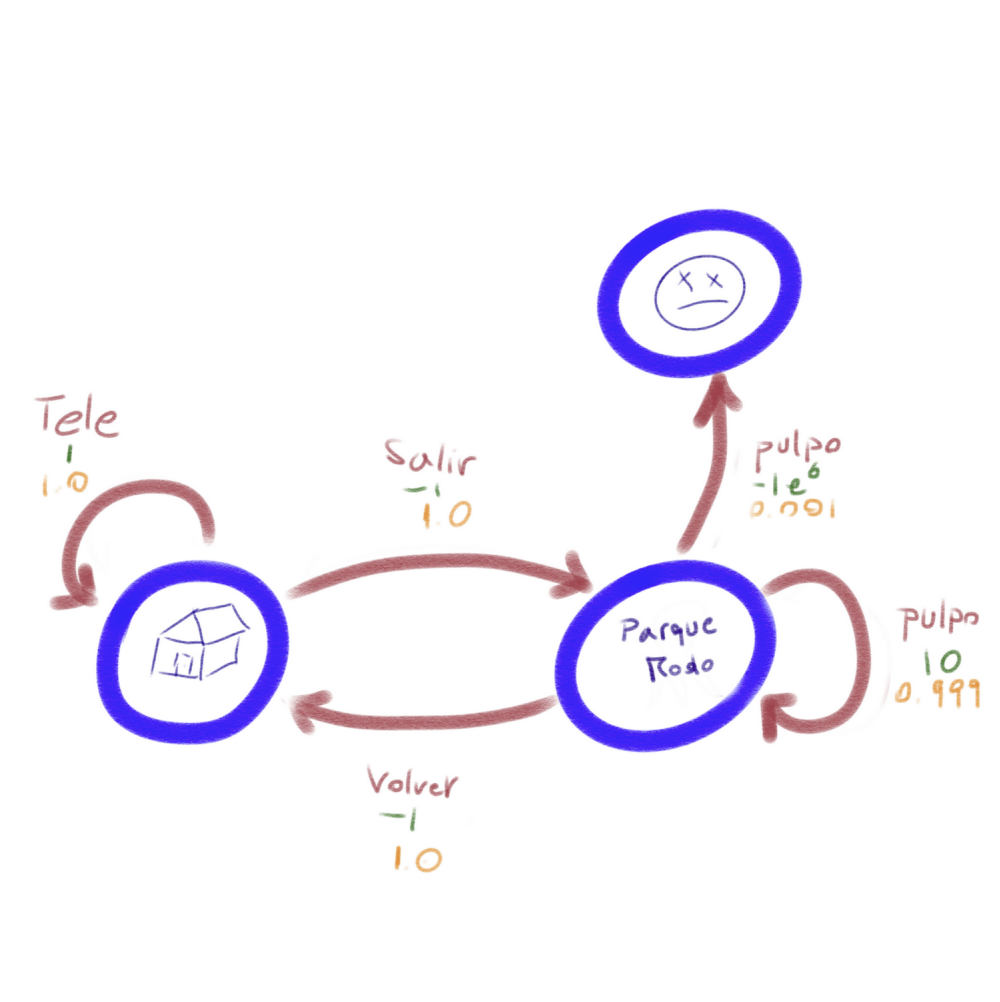
Los SCF comprenden sistemas que típicamente miden variables del entorno, toman alguna decisión en base a lo sensado y otro conocimiento que posea, y actúan sobre el medio físico o el conocimiento. CPS comprise systems that typically measure environmental variables, make a decision based on sensing and other knowledge, and act on the physical environment or knowledge.
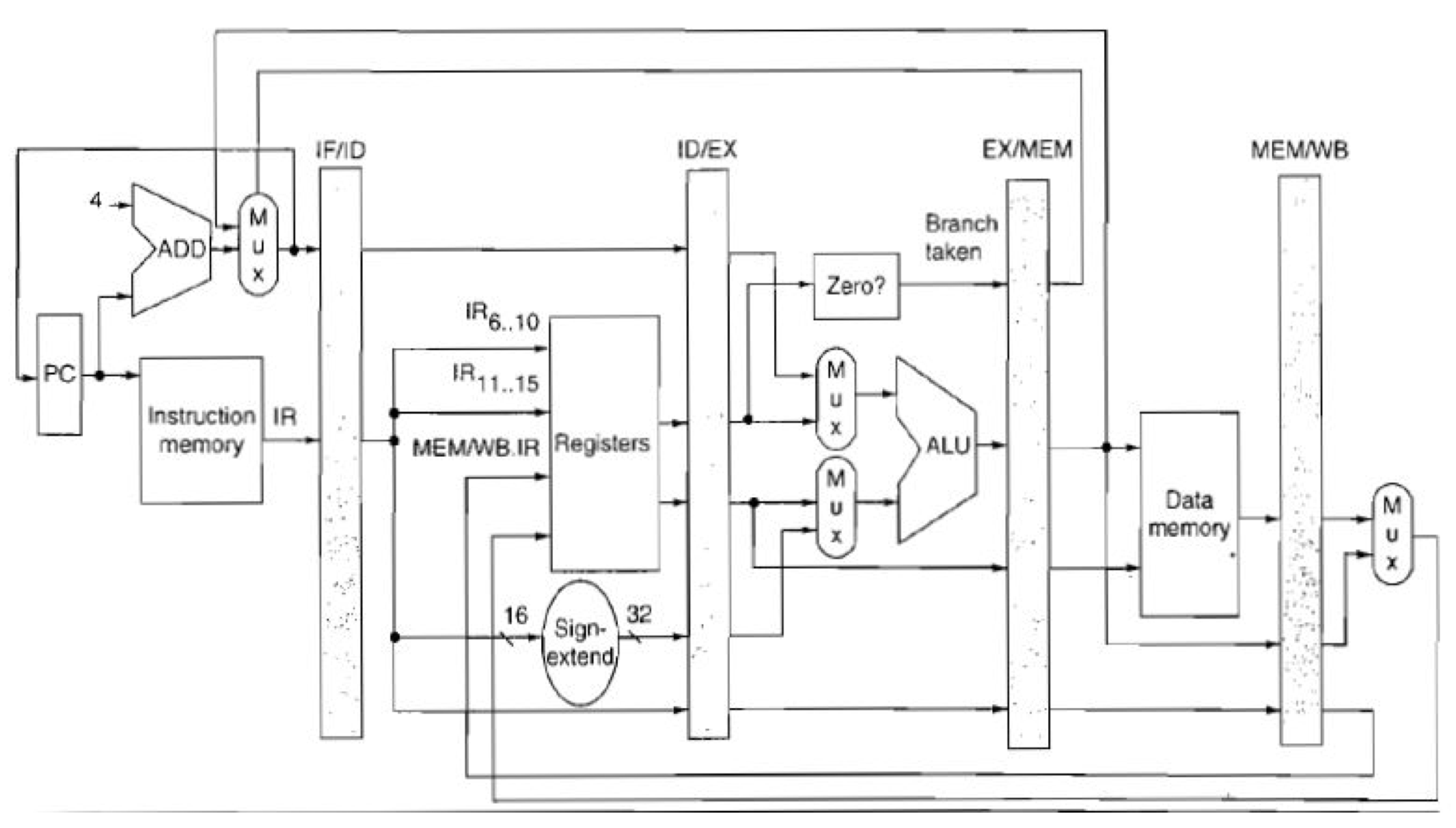
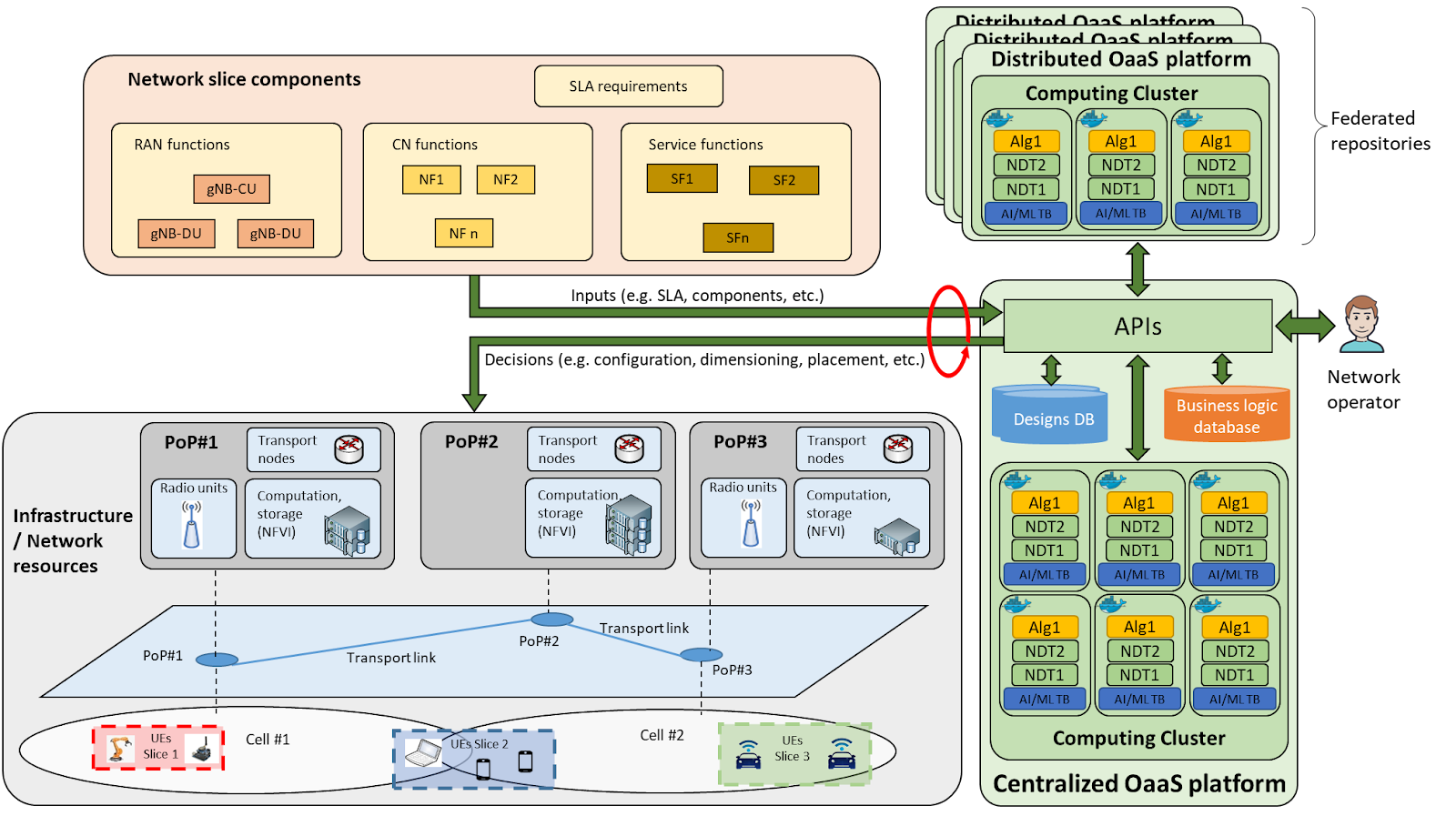
Leer más Read moreVirtualización Virtualization
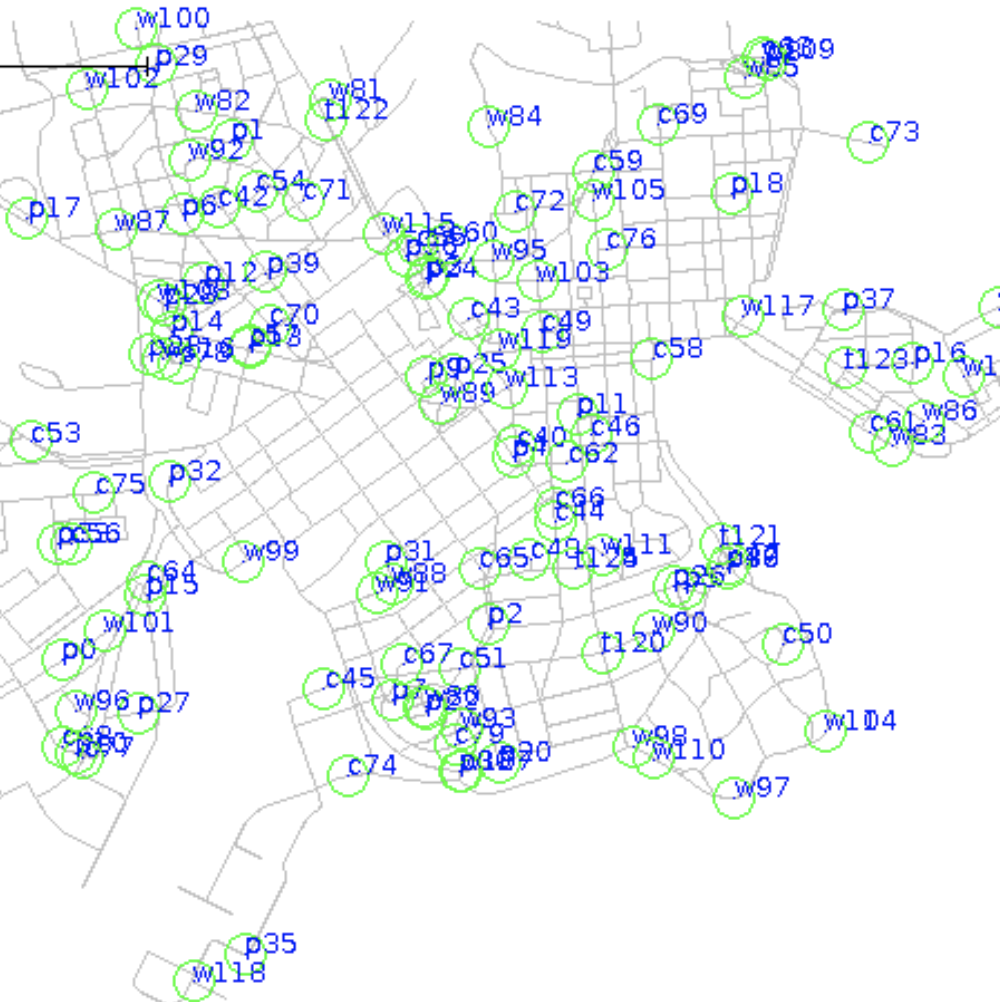
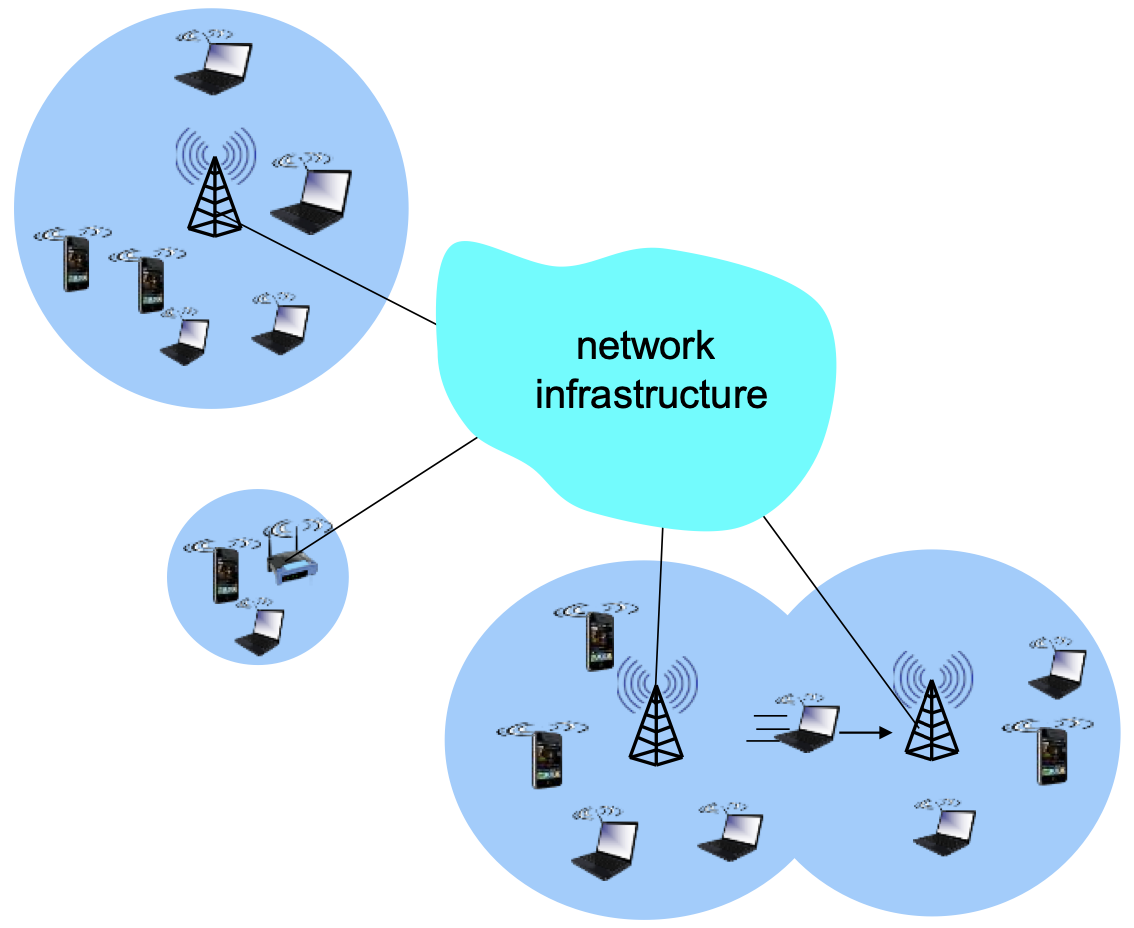
La gestión dinámica de estos nuevos paradigmas de despliegue de servicios de informática y telecomunicaciones plantea enormes desafíos. The dynamic management of these new paradigms for the deployment of IT and telecommunications services poses enormous challenges.
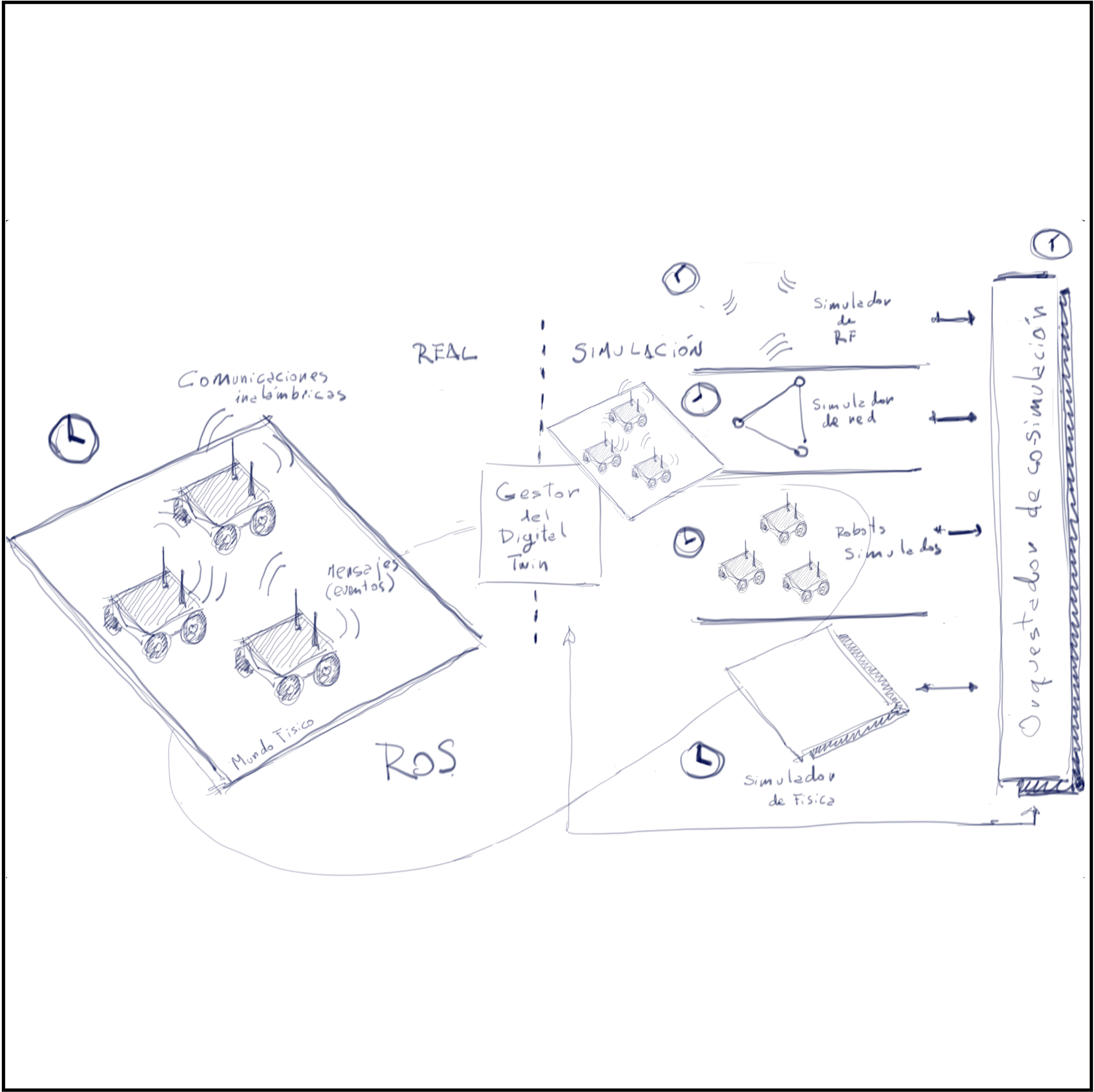
Leer más Read moreGemelos digitales Digital twins
Pueden reducirse a una simulación de un objeto y/o un contexto físico que se ejecuta en paralelo al objeto real que modela. They can be reduced to a simulation of an object and/or a physical context that runs parallel to the real object that it models.
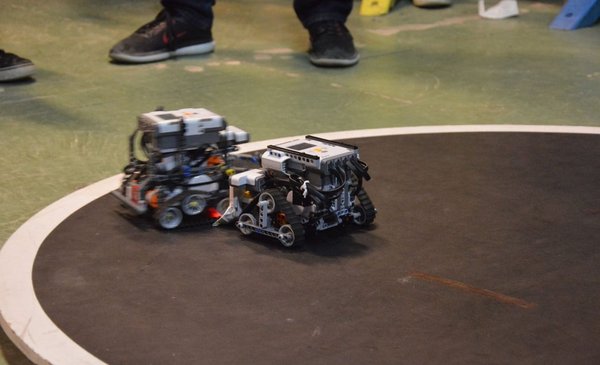
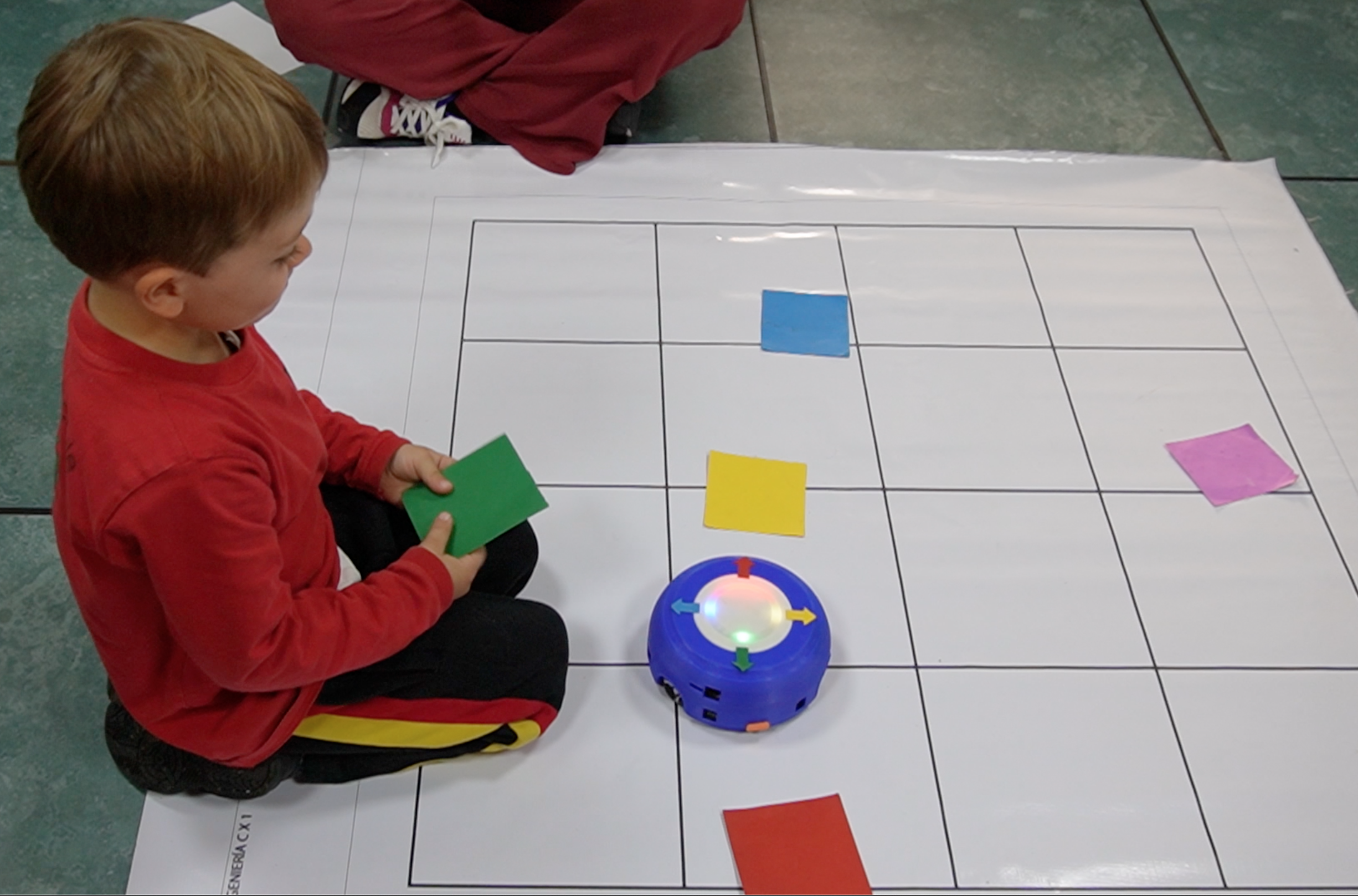
Leer más Read moreSCF Educativos Educational CPS
La literatura reciente señala a las plataformas robóticas como elementos adecuados para el abordaje del uso de tecnologías educativas en edades tempranas. Recent literature points to robotic platforms as suitable elements for addressing the use of educational technologies at an early age.
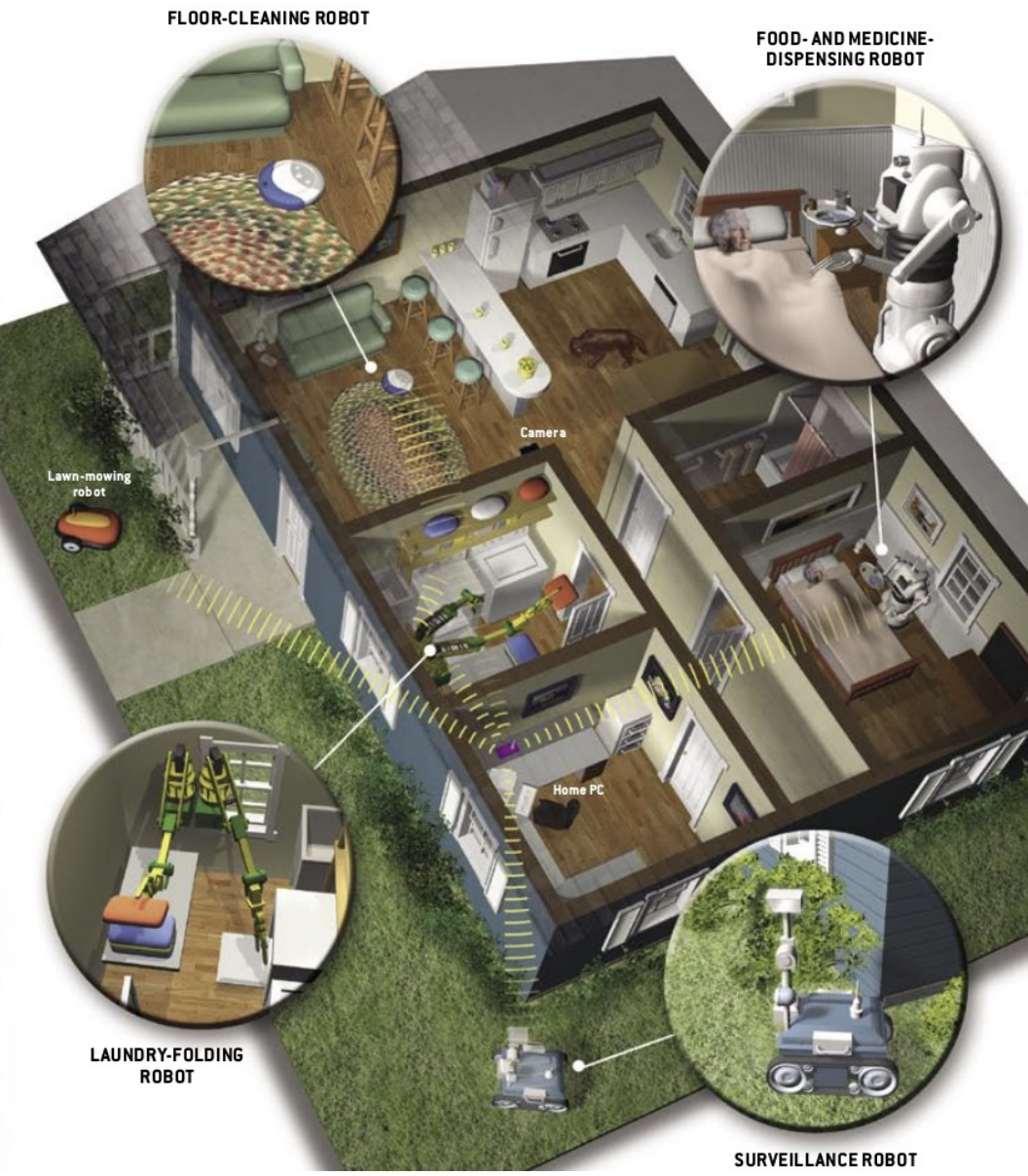
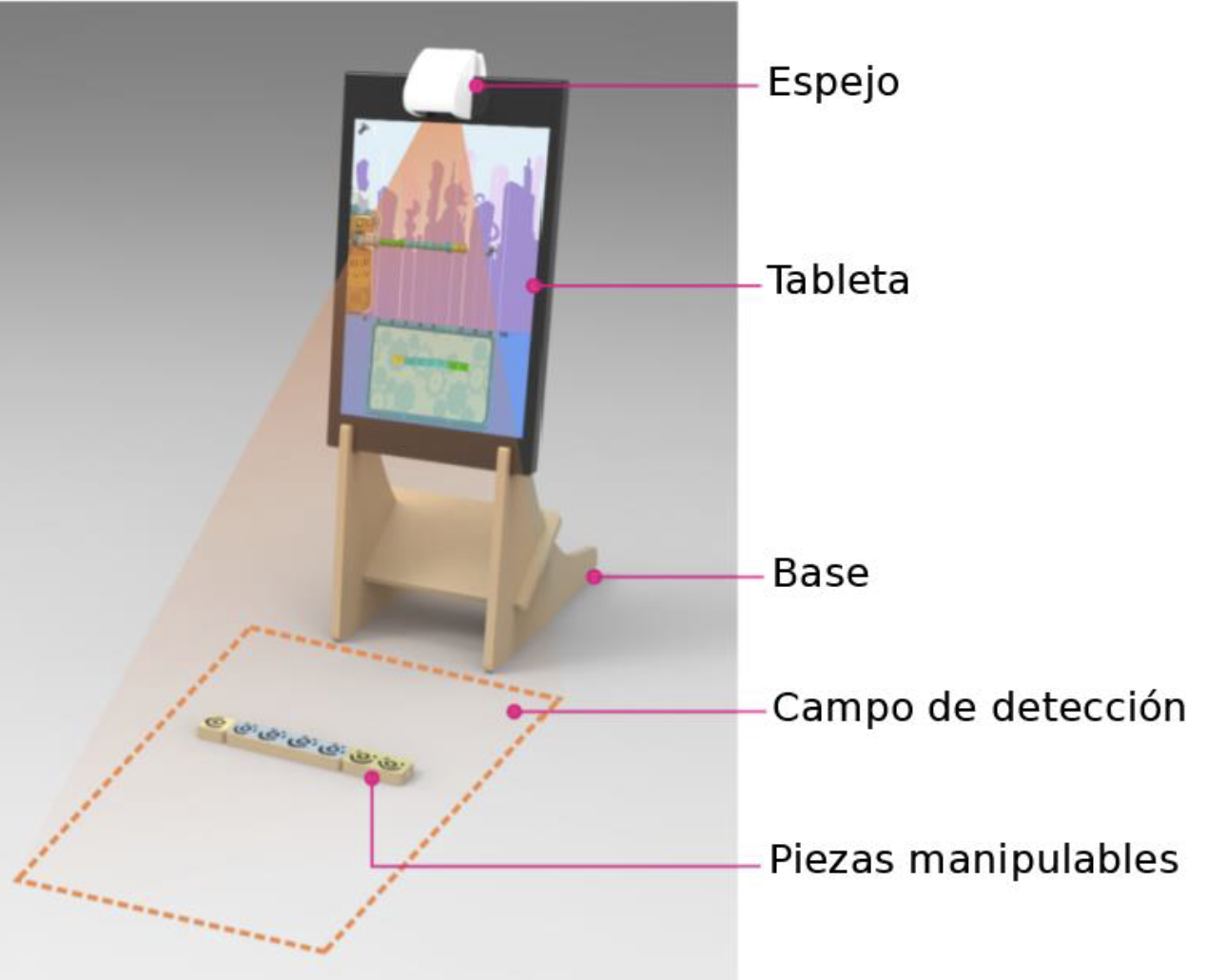
Leer más Read moreInteracción persona-SCF Person-CPS interaction
Los SCF a menudo cooperan estrechamente con los seres humanos o necesitan ser operados directamente por un operador humano. CPS often cooperate closely with humans or need to be operated directly by a human operator.
Leer más Read moreGalería de fotos Photo Gallery













Actividades Activities
del grupo MINA
- Divulgación Dissemination
- seMINArios seMINArs
- Extensión