Que no se caiga de la mesa!
De Proyecto Butiá
Revisión del 19:36 28 jun 2020 de Agustina.salmanton (Discusión | contribuciones)
Descripción del proyecto
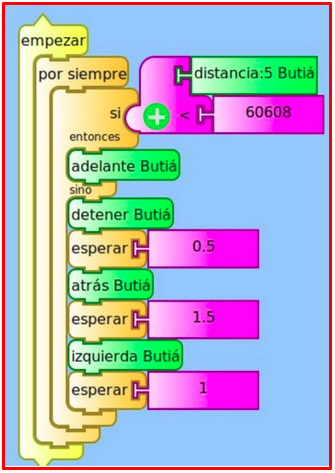
El siguiente programa tiene como objetivo que el robot Butiá logre desplazarse alrededor de una mesa sin caerse.
Materiales
- Kit butia
- Sensor de distancia
- Programa TURTLEBOTS - Este se encuentra disponible tanto para las computadoras XO, como para las computadoras de distribución de GNU/Linux.
- Computadora
Proyecto
A continuación se presenta en formato pdf el proyecto completo, el cual contiene: -Una explicación detallada sobre el armado del robot butiá. -Link a manual de instalación del programa TURTLEBOTS con una guía básica sobre su uso y una introducción al uso de sensores. -Dos ejemplos para el uso del robot Butiá.
PROYECTO COMPLETO
Para continuar es necesario tener una noción básica de los puntos anteriormente mencionados y se debe colocar el sensor distancia en el robot Butiá.
Programa
https://www.fing.edu.uy/inco/proyectos/butia/mediawiki/images/6/61/Prog2.1.PNG
{kind=link}