
Mapinect
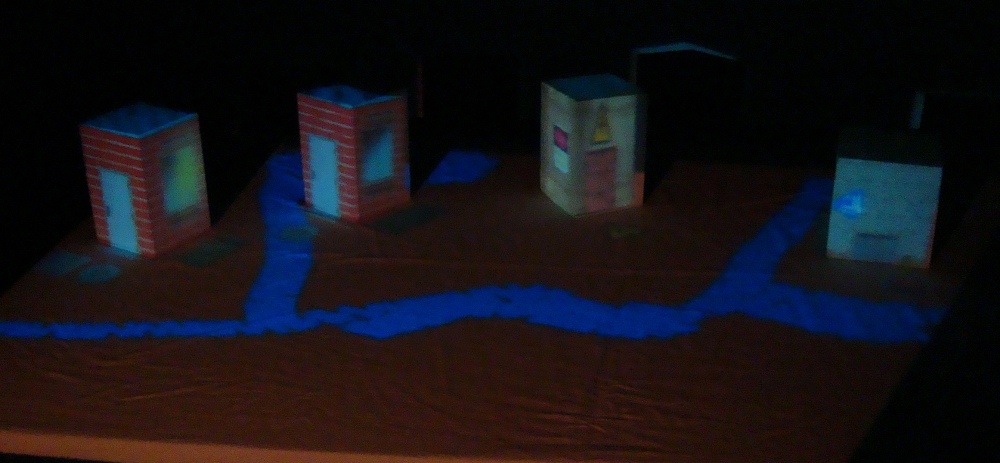
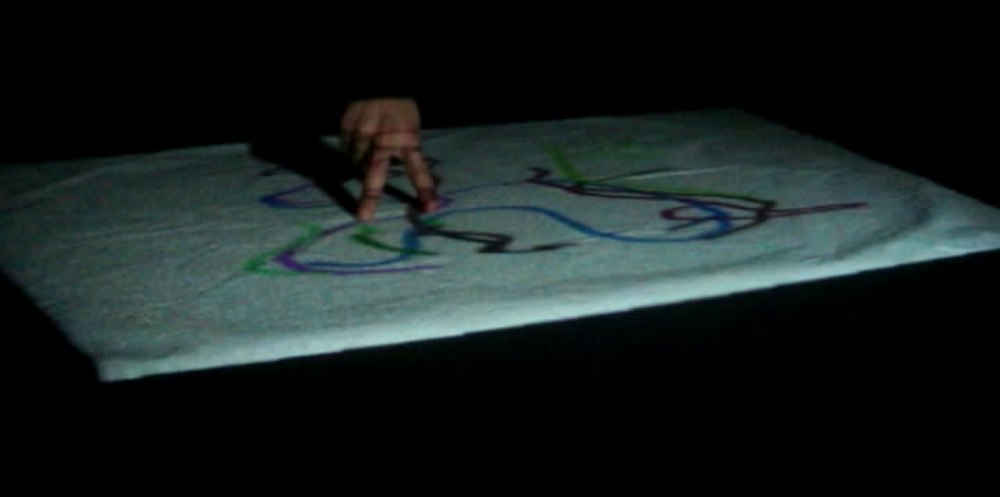
The objective of this project is to develop a simple robotic arm carrying a pocket projector and a Kinect sensor, that will allow to project and augment objects surrounding the robotic arm.
Different fields of study are combined, like computer vision, robotics and augmented reality.



The following tasks are included in the scope of the project:
- design and construction of the robotic arm, using Dynamixel AX-12+ servo motors
- implementation of an open-source C++ library based on OpenFrameworks, for developing augmented reality applications
One or more applications will be built in order to demonstrate the feasibility of the device – and to make some fun apps !

The objective of this project is to develop a simple robotic arm carrying a pocket projector and a Kinect sensor, that will allow to project and augment objects surrounding the robotic arm.
Different fields of study are combined, like computer vision, robotics and augmented reality.
The following tasks are included in the scope of the project:
- design and construction of the robotic arm, using Dynamixel AX-12+ servo motors
- implementation of an open-source C++ library based on OpenFrameworks, for developing augmented reality applications
One or more applications will be built in order to demonstrate the feasibility of the device – and to make some fun apps !
|
Credits: Mapinect is a degree thesis project developed by: Verónica Manduca, Rodrigo Rivera, Guillermo Pérez, and Germán Hoffman Tutored by: Tomás Laurenzo and Christian Clark |